Accantonando la speculazione filosofica Galileo imposta come vero metodo di conoscenza della realtà la sperimentazione
ossia la dimostrazione oggettiva di relazione di causa ed effetto tra elementi della natura. Relazioni ipotizzate,
se comprovate sperimentalmente, divengono leggi fisiche.
Galileo si sofferma sullo studio del moto dei corpi rigidi. Le relazioni che ne emergono saranno leggi della natura se
avvalorate in ogni successivo esperimento, svolto in tempi diversi, luoghi diversi, da osservatori diversi. Nasce da
qui il concetto di relatività.
Uno stesso oggetto può essere misurato da osservatori posti in punti diversi, posti a distanze e angolature differenti
fermi o in movimento rispetto al corpo. Ognuno trae una propria misura del corpo. Una misura relativa al punto di
osservazione. Le diverse percezioni ottenute sono tutte parimenti valide, ma non assolute. Tenendo conto in cosa
differisce un punto di osservazione da un altro e possibile ottenere delle formule di trasformazione per passare dalla
misura ottenuta da un osservatore a quella avuta da un altro.
Nella fisica classica La realtà, il mondo che ci circonda, non è concepito come relativo. Esso è dato per assoluto.
Se partiamo dal presupposto che la realtà è unica, tutti gli sperimentatori devono pervenire alle stesse leggi che la
regolano. Non tutto può essere relativo. Affinché la sperimentazione conduca agli stessi risultati necessita di
essere strutturata su concetti di base, comuni a tutti gli sperimentatori.
Spazio. Caratteristica dei corpi è quella di avere una estensione, di occupare spazio o meglio una parte dello
spazio disponibile. Lo spazio diviene quindi il contenitore fisico degli oggetti della realtà. In questo ambiente due
corpi compatti non possono sovrapporsi ossia stare nello stesso posto. Nella meccanica dove ciò che conta è il moto,
non ciò che si muove i corpi si distinguono grazie a questa loro diversa collocazione nello spazio.
Nominiamo queste diverse allocazioni con il termine posizione. Una posizione in uno spazio è definibile attraverso
costruzioni geometriche dette sistemi di riferimento, capaci di quantificare le distanze. Ecco che lo spazio viene
immaginato come un immenso o infinito sistema geometrico misurato da assi cartesiani disposti su tre dimensioni.
Tempo. I corpi non sono vincolati a una posizione, possono muoversi. Nel muoversi possono interagire secondo
quelle regole di causa effetto che chiamiamo leggi della fisica. Un corpo può avere una posizione e dopo un'altra.
Un evento di causa precede la conseguenza. Possiamo allineare queste successioni e contarle, lungo una retta orientata
immaginaria che chiamiamo tempo. Il tempo acquisisce una funzione di dimensione con caratteri "geometrici" simili a
quelli di una dimensione spaziale.
Argomentando con il supporto delle osservazioni quotidiane del mondo e del pensiero logico e filosofico la fisica
classica si è fondata su una realtà immaginata come fatta di spazio e tempo. A questi due elementi fondamentali ha
assegnato per forza di logica proprietà assolute, valide per ogni osservatore.
Lo spazio assoluto. Se concepiamo lo spazio come contenitore unico del tutto e se concepiamo la realtà che
percepiamo come il suo contenuto, possiamo assumere che lo spazio sia un ente fisso e immutabile. La meccanica studia
in moto dei corpi in esso, che rimane un riferimento teorico non soggetto a moto.
Il tempo assoluto. Il tempo è concepito come un moto continuo, inarrestabile dal passato al futuro. Il suo
scorrere non è influenzato dagli eventi, al più usati questi per misurarlo. Esso è più un costrutto logico che una
proprietà della realtà e come tale lo abbiamo concepito unidirezionale e uniforme nello scorrere.
Indipendenza di spazio e tempo. I due pilastri della fisica seppur simili nella loro strutturazione hanno
applicazione su due aspetti del reale totalmente distinti. Il tempo esprime il susseguirsi dei fotogrammi dello spazio
che ci mostrano in tal modo il film della realtà. Ma il tempo non può modificare i fotogrammi e i fotogrammi non possono
alterare la frequenza del loro succedersi. Spazio e tempo sono due mondi diversi che insieme descrivono la realtà.
Il moto dei corpi nella meccanica classica è contestualizzato in uno spazio tridimensionale regolato da una geometria
euclidea. In esso si è cercato non solo di descrivere i modi del moto (rettilineo, circolare, uniforme, accelerato,
...), ma anche di ricercare le cause. Attraverso l'evidenza sperimentale si sono quindi isolate le leggi fondamentali
del moto che pongono nel concetto di forza la fonte (causa) del movimento (conseguenza).
Prima legge di Newton o principio d'inerzia o di Galileo. Esso attesta che un corpo isolato ossia sul quale non
agiscono forze o la somma delle quali è nulla, si trova in quiete (fermo) o si muove di moto rettilineo uniforme.
Chiamiamo inerziale tale stato di moto, caratterizzato da una velocità costante che comporta una quantità di moto
costante.
ρ = mv = cost
Seconda legge di Newton o legge fondamentale della dinamica. Una corpo modifica il suo stato inerziale di quiete o di moto rettilineo uniforme se vi si applica una forza non nulla. Una forza applicata per un certo intervallo di tempo prende varia quella che chiamiamo la quantità di moto: ρ posseduta dal corpo.
Δρ = FΔt = mΔv
Possiamo reinterpretare il concetto considerando una massa m che acquisisce un'accelerazione a se vi si applica forza F.
mΔv
F = ——— = ma
Δt
Terza legge di Newton o principio di azione e reazione. Un corpo che a seguito nel suo moto esercita una forza un un altro corpo, subisce da questo una forza di reazione di pari intensità e direzione, ma di verso opposto.
L'esperienza sperimentale e la modellizzazione della realtà in coerenza con le leggi di Newton portano allo sviluppo
di ulteriori principi generali.
Principio di propagazione delle forze. Il contatto fisico non è il solo modo di applicare una forza a un corpo.
L'esperienza dei campi gravitazionali o magnetici mostra delle forze trasmesse a distanza. Il campo non è considerato come
un'onda che si propaga, ma come una griglia di forze che circondano fino all'infinito il corpo da cui è generata.
Il campo si manifesta contestualmente alla sorgente. Le forza esercitata dal campo su un corpo è già presente lì dove
questo si trova. Possiamo dire che si propaga istantaneamente. L'azione del campo è quindi immediata anche a distanza
infinita.
Principio di determinismo di Newton-Laplace. Da quanto detto si può affermare che ogni forza applicata a un
corpo lascia una traccia nel suo moto (lo accelera, rallenta, devia). Questa osservazione ci permette di comprendere
come conoscendo tutte le forze subite da un corpo si possono determinare con certezza i suoi moti passati e predirre
quelli futuri.
Principio di equivalenza del moto inerziale. Un corpo non soggetto a forze non sperimenta accelerazioni. Che
sia in quiete o in moto non sperimenta accelerazioni. Lo stato inerziale ossia l'invarianza della quantità di moto,
quindi dell'energia cinetica posseduta, porta questi corpi ad avere un medesimo comportamento in termini di leggi
fisiche. Indipendentemente dalla quantità di moto posseduta da un corpo in moto inerziale le leggi della meccanica di
Newton rispondono sempre ai dati sperimentali, senza necessità di adattamenti.
Il metodo sperimentale di Galileo si basa su misurazioni del moto dei corpi. Le misurazioni avvengono nello spazio e
nel tempo. Abbiamo quindi bisogno di un sistema per misurare lo spazio e il tempo.
Misurare lo spazio significa calcolare le distanze tra i suoi punti. Per far ciò occorre codificare con un sistema
unico le posizioni dello spazio, in modo da poterle confrontare determinandone in tal modo la distanza. Un sistema di
riferimento è una costruzione geometrica che codifica le posizioni dello spazio in relazione a un punto scelto
arbitrariamente, chiamato punto di riferimento.
Spazio relativo. Ogni punto dello spazio può essere preso come punto di riferimento. Scegliere come riferimento
un punto dello spazio vuoto è poco pratico in quanto difficilmente identificabile. La praticità e la convenienza
sperimentale ci spingono a utilizzare come riferimenti dei corpi solidi, ben identificabili e in quiete rispetto
all'osservatore. Nello spazio i corpi hanno una posizione diversa che possono modificare, muovendosi con velocità
diverse. Consegue che seppure soggette alle stesse leggi, misurazioni eseguite basandosi su riferimenti diversi (anche
con l'adozione della stessa unità di misura) portano a valorizzazioni diverse. La non esistenza di un punto dello
spazio o un corpo privilegiati impone che non vi sia un sistema e quindi una codifica dello spazio che possa dirsi
assoluta. Se lo spazio, le sue proprietà, le sue leggi sono assolute, la loro misura non non lo è. L’adozione di uno
o dell’altro sistema di riferimento altera il valore numerico non quello reale. In un contesto fisico è quindi
prioritario definire il sistema di riferimento adottato.
Principio di relatività di Galileo. All'interno di un sistema inerziale tutti i corpi solidali con esso, se non
soggeti a nuove forze, manifestano una quantità di moto (velocità) comune a tutti, sia in termini di entità che di
direzione e verso. Questo è il principio della conservazione della quantità di moto di un sistema isolato. Le distanze
relative interne al sistema non sono influenzate dalla velocità del sistema. Questa velocità è un dato che si rileva
in relazione a qualcosa di esterno. Senza riferimenti esterni non è quindi possibile rilevare e quindi misurare il
moto di un sistema. Un sistema inerziale dall'interno è percepito come immobile. Non è quindi distinguibile in termini
di meccanica dei suoi corpi da un'altro.
Principio di reciprocità del moto. Il moto inerziale di un sistema è però percepibile dall'esterno, da un altro
sistema di riferimento. Se anche questo è inerziale si può però solo percepire il moto relativo. Non si può affermare
che uno sia immobile e l'altro in moto o viceversa o che siano in moto entrambi. Tutte queste soluzioni sono possibili,
ma l'assenza di un riferimento assoluto rende relativa o discrezionale la scelta di quale adottare.
In uno spazio possono essere presi come riferimento infiniti punti inerziali. In essi un medesimo esperimento otterrà
quindi le stesse risultanze. Nessun sistema di riferimento inerziale è quindi privilegiato rispetto agli altri. Questo
è possibile solo se in tali sistemi lo spazio e il tempo rispondono a precisi requisiti.
Spazio omogeneo. Se vogliamo che in ogni sistema di riferimento inerziale ovunque posto nello spazio si
riscontrino le stesse leggi della meccanica dobbiamo imporre che il sistema sia invariante nelle sue misurazioni se
traslato linearmente nello spazio.
Spazio isotropo. Quanto sopra non è sufficiente, occorre imporre che non vi sia una direzione privilegiata.
Un sistema inerziale deve essere invariante nelle sue misurazioni anche a seguito di rotazioni rispetto ai suoi assi.
Tempo omogeneo e uniforme. Ulteriore condizione per l'assenza di sistemi inerziali privilegiati è che la
misurazione del tempo effettuata in un sistema venga sempre a coincidere con quella eseguita in altri sistemi,
ovunque si trovino nello spazio (omogeneità) e nel tempo (uniformità). La conseguenza fisica è che nel tempo i corpi
non sono liberi, essi si muovono all'unisono lungo un'unica direzione (il futuro) e a una velocità costante e
universale (unica per tutti i sistemi).
Si osservi come per i requisiti qui esposti non viene richiesto di essere proprietà intrinseche dello spazio, ma è
sufficiente che lo siano dei sistemi di riferimento inerziali.
Abbiamo asserito che la scelta del sistema di riferimento non altera le leggi del moto. Le formule sono le stesse,
quello che cambia sono i valori in esse immessi. Ogni sistema di riferimento codifica proprie coordinate spaziali e
temporali. Per i principi di omogeneità e isotropia dello spazio e del tempo tali valori, seppur diversi, devono
condurre alle stesse misure di distanza e intervalli. Esiste quindi la possibilità di avere delle formule di
trasformazione che permettono di passare dalle coordinate di un sistema a quelle di un altro.
Dato che il moto inerziale è descritto da funzioni lineari anche le funzioni di trasformazione lo sono. Le coordinate
dei sistemi di riferimento sono date dagli assi dimensionali, tre spaziali e uno temporale. Per passare da una misura
espressa nelle coordinate di un sistema a quelle di un altro dobbiamo quindi mettere in relazione gli assi.
Creiamo un sistema di equazioni lineari che pone le coordinate delle quattro dimensioni di un sistema di riferimento
R':(x', y', z', t') in relazione con le coordinate di un altro sistema R:(x, y, z, t).
┌
│ x' = a11x + a12y + a13z +
a14t + a10
│
│ y' = a21x + a22y + a23z +
a24t + a20
│
│ z' = a31x + a32y + a33z +
a34t + a30
│
│ t' = a41x + a42y + a43z +
a44t + a40
└
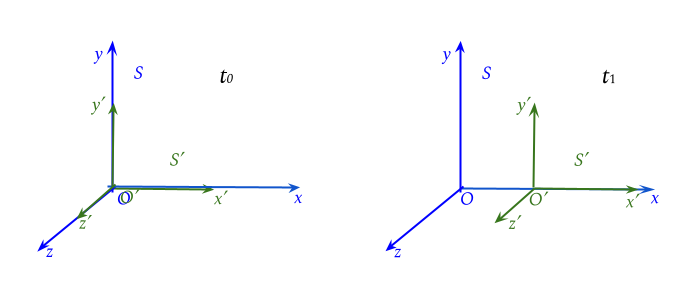
Semplifichiamo i calcoli ponendo i due sistemi in una configurazione spaziale x-standard che genera una differenza tra due sistemi sovrapposti attraverso una traslazione lungo l'asse x. La sovrapposizione dei due sistemi in un tempo comune comporta che deve esistere una situazione in cui tutte le coordinate di entrambi i sistemi sono contemporaneamente a zero. Ciò è possibile solo se sono nulli i termini a10, a20, a30, a40
┌
│ x' = a11x + a12y + a13z +
a14t
│
│ y' = a21x + a22y + a23z +
a24t
│
│ z' = a31x + a32y + a33z +
a34t
│
│ t' = a41x + a42y + a43z +
a44t
└
La traslazione lungo il solo asse x significa che gli assi y' e z' rimango paralleli ai corrispondenti y e z. La reciproca relazione rimane invariata nel tempo. Si azzerano quindi i coefficienti: a21, a23, a24 e a11, a42, a44.
┌
│ x' = a11x + a12y + a13z +
a14t
│
│ y' = a22y
│
│ z' = a33z
│
│ t' = a41x + a42y + a43z +
a44t
└
L'isotropia dello spazio ci obbliga a porre che la direzione di traslazione può essere invertita senza che occorrano variazioni nel sistema di equazioni. Possiamo porre x' = -x', y' = -y', z' = -z', ma anche possiamo conservare il segno (mantenendo l'invarianza delle funzioni) invertendo gli altri assi: y' diventa z' e viceversa. Quindi dobbiamo garantire:
y' = −a22y
z' = −a33z
che ci porta porre a22 e a33 uguali a uno.
Abbiamo anche la condizione:
z' = a22z
y' = a33y
Che conferma come i due coefficienti debbano possedere lo stesso valore. Il sistema di equazioni si semplifica ulteriormente.
┌
│ x' = a11x + a12y + a13z +
a14t
│
│ y' = y
│
│ z' = z
│
│ t' = a41x + a42y + a43z +
a44t
└
L'invarianza delle coordinate y e z ci porta ad escluderle come variabili nella determinazione di x e t.
┌
│ x' = a11x + a14t
│
│ y' = y
│
│ z' = z
│
│ t' = a41x + a44t
└
Poniamo il sistema R' in allontanamento rispetto al sistema R lungo l'asse x a una velocità di trascinamento v. Avremo quindi i coefficienti determinati da (essere funzione di) v.
┌
│ x' = a11(v)x + a14(v)t
│
│ y' = y
│
│ z' = z
│
│ t' = a41(v)x + a44(v)t
└
Osserviamo che i punti del sistema R' posti sul piano y'z' hanno coordinata x' = 0. La prima equazione deve poter assumere valore nullo.
0 = a11(v)x + a14(v)t
−a11(v)x = a14(v)t
−a11(v)x / t = a14(v)
−a11(v)v = a14(v)
Sostituiamo la corrispondenza trovata per la coordinata a14(v) nella prima equazione.
x' = a11(v)x −a11(v)vt
x' = a11(v)(x − vt)
Cerchiamo ora di trovare un valore anche per i coefficienti della quarta equazione, quella temporale. Dato il sistema di equazioni possiamo utilizzare la prima. Questa per il principio di relatività può essere scritta in forma inversa.
x = a11(−v)(x' + vt')
Ricaviamo da questa equazione t'.
x
——————— −x' = vt'
a11(−v)
Di questa equazione conosciamo il valore di x' che corrisponde alla prima equazione. Attuando la sostituzione abbiamo:
x
———————— −a11(v)(x − vt) = vt'
a11(−v)
1 x
——— ⎡———————— −a11(v) x ⎤ + a11(v)t = t'
v ⎣ a11(−v)
⎦
a41(v)x
+ a44(v)t = t'
Nell'ultimo passaggio abbiamo messo a confronto la formula di t' ottenuta con la corrispondente equazione
del sistema (la quarta). Associando i termini abbiamo che a11(v)t
= a44(v)t.
Raccogliamo le conclusioni ottenute nel sistema si equazioni che ci permette di scrivere la massima semplificazione
(con soli due coefficienti incogniti) ottenibile osservando le proprietà
spaziali.
┌
│ x' = a11(v)(x − vt)
│
│ y' = y
│
│ z' = z
│
│ t' = a41(v)x + a11(v)t
└
Consideriamo ora i principi di uniformità e omogeneità del tempo. In entrambi i sistemi di riferimento abbiamo una coincidenza del tempo. Adottando un'uguale unità di misura l'equivalenza diventa anche numerica: t' = t. Questa condizione impone che: a41 = 0 e a11 = 0. Ne consegue che anche la prima equazione risulta semplificata.
┌
│ x' = x − vt
│
│ y' = y
│
│ z' = z
│
│ t' = t
└
Quelle appena scritte sono le leggi di trasformazione di Galileo, aventi un unico parametro la velocità
relativa tra i due sistemi di riferimento. Nella formulazione, le coordinate misurate x, y, z, t, relative a
fenomeni in R vengono convertite nelle coordinate x', y', z', t', ossia portate nei valori di misura
ottenibili in R' sui fenomeni accaduti in R.
Naturalmente è possibile fare in contrario, da R misurare accadimenti di R'. Per il principio di
relatività se il fenomeno è il medesimo le differenze di misurazione devono essere le stesse che sia R a
osservare R' o viceversa. Se vogliamo esprimere la velocità di traslazione non in relazione al sistema
osservante, ma con un verso univoco ecco che indicheremo con il segno positivo la velocità di traslazione di un sistema
R' rispetto a un sistema R e con segno negativo la velocità (avente stesso modulo) di R rispetto a
R'. Le leggi di trasformazione rimangono invarianti se non per il cambio si segno del parametro v
┌
│ x = x' − (−v)t
│
│ y = y'
│
│ z = z'
│
│ t = t'
└
Tornando alle semplificazioni imposte possiamo impostare il moto relativo non lungo uno specifico asse. Chiamiamo quindi x questa una generica direzione, che sarà composta dalle coordinate delle basi dei sistemi di riferimento: x = [x, y, z]
┌
│ x' = x − vt
│
│ t' = t
└
La sovrapposizione dei sistemi al tempo zero può essere fatta decadere, inserendo i termini di scostamento iniziale, sia spaziale che temporale.
┌
│ x' = x − vt − x0
│
│ t' = t + t0
└
Nella nostra analisi abbiamo imposto che le basi dei due sistemi siano allineate lungo le medesime direzioni. Possiamo far cadere questa condizione e porre una matrice 3 × 3 di rotazione (tre angoli per ogni asse) da applicare ai vettori componenti.
┌
│ x' = R(x − vt - x0)
│
│ t' = t + t0
└
Queste ottenute sono le più generiche funzioni di trasformazione di Galileo tra sistemi inerziali. In essa sono presenti per ogni coordinata ben 10 parametri, i tre angoli della matrice di rotazione, le tre componenti della velocità, le tre componenti di x0 e t0.
Per il principio di relatività di Galileo le leggi della meccanica sono invarianti se soggette a trasformazioni
lineari delle coordinate, ossia nel passaggio da un sistema di riferimento inerziale ad un altro. Tale postulato
viene definito anche come principio di simmetria della meccanica classica. Dimostriamo questa affermazione.
Relatività della distanza. Dato un regolo posto parallelo all'asse di moto relativo di due sistemi inerziali
abbiamo due modi di misurare una distanza da un sistema inerziale estero. Rilevare in un dato istante le coordinate
dei due estremi oppure rilevare il tempo di passaggio per un dato punto delle due estremità del regolo in moto relativo
con il sistema a cui è solidale.
Nel primo caso abbiamo Δt=0 e quindi coincidenza nella misura tra i due sistemi.
Δx' = (x1 − vt0) − (x0 − vt0) = Δx
Nel secondo caso interviene il termine temporale cosa che porta le misurazioni nei due sistemi a divergere.
Δx' = (x1 − vt1) − (x0 − vt0) = Δx − vΔt
Composizione delle velocità. Data la velocità assoluta u di un corpo calcolata in un sistema di riferimento Rad esso solidale, calcoliamo come questa viene percepita in un sistema non solidale caratterizzato da una velocità di trascinamento vx. Scomponiamo il moto del corpo lungo le direttrici x,y,z e calcoliamo per ciascuna la funzione di trasformazione dal sistema R a R'.
┌
│ ux' = d(x − vxt)/dt = dx/dt − vxt/dt
= ux - vx
│
│ uy' = d(y)/dt = uy
│
│ uz' = d(z)/dt = uz
└
Raggruppando le componenti in un unico vettore velocità abbiamo:
u' = u − vx
La velocità dei corpi non è assoluta, ma relativa rispetto al sistema dal quale
viene misurata.
Invarianza dell'accelerazione. L'accelerazione misurata da un sistema esterno non è influenzata dalla velocità di
trascinamento che in quanto costante da un contributo nullo alle accelerazioni.
a' = du/dt − dvx/dt
a' = a − 0