La geometria euclidea e la geometria analitica sono focalizzate nello studio di forme e spazi topologici regolari. Per studiare e calcolare lunghezze, superfici, aree di forme e spazi più sofisticati, sono necessari strumenti matematici più complessi quali quelli del calcolo differenziale e integrale.
Affinché in uno spazio topologico sia applicabile la geometria differenziale e possa quindi definirsi varietà o
all'inglese manifold, occorre che esso sia dotato di precise caratteristiche.
Spazio di Hausdorff
Uno spazio topologico dotato di una topologia (sottoinsiemi in esso identificabili) sufficientemente fine che, dati due
punti qualsiasi in esso, esistono almeno due loro intorni che non si intersecano tra loro, è detto di Hausdorff.
Il concetto di intorno permette di distinguere due punti senza utilizzare il concetto di distanza. La distinguibilità
dei punti di un insieme garantisce l’esistenza di un limite unico nelle funzioni operanti in questo spazio, condizione
necessaria per la loro derivabilità. Una varietà deve essere uno spazio di Hausdorff.
Base numerabile per il secondo assioma di numerabilità (Second Numerable Axiom)
Definiamo innanzitutto il concetto di base. Dato uno spazio si definisce base un gruppo ristretto di suoi sottoinsiemi,
detti generatori, tale che qualsiasi altro sottoinsieme è costituito dall'unione di insiemi della base. Da ciò
risulta che ogni intersezione di insiemi di una base è anch'essa un insieme della base.
Una base è primo numerabile se localmente esiste una corrispondenza biunivoca tra i suoi elementi e l'insieme N.
Risulta secondo numerabile se tale corrispondenza è estendibile allo spazio intero. L'utilizzo della base al posto della
topologia permette di limitare il numero di insiemi utilizzati nella descrizione dello spazio. Se poi questi sono numerabili
rende agevole la formulazione matematica di concetti come la distanza. Inoltre permette di rappresentare intorni separati o
concentrici, tali da poter identificare i punti di accumulazione distinti.
I due caratteri permettono alla varietà di essere uno spazio sia separabile che denso, ossia tale da garantire l'esistenza
di un valore e che sia unico nel calcolo del limite e che le derivazioni siano applicabili per un grado infinito.
Lo studio topologico (nella sua interezza) di uno spazio può essere difficoltoso e approssimativo. Un'alternativa è
l'analisi locale di singoli intorni. Questi se sufficientemente piccoli possono essere approssimati a spazi lineari.
Localmente si assume che le proprietà topologiche di un intorno W di una varietà M sono le stesse di un
corrispondente aperto U in Rn. In tal modo poniamo che la topologia locale di U è
indotta in W. Essendo U uno spazio euclideo possiamo utilizzare la sua geometria per studiare W.
Con omeomorfismo definiamo il presupposto fondamentale della geometria differenziale, l’esistenza tra due spazi di una
funzione continua, biunivoca tale da collegare ciascun punto o intorno di uno spazio M a un punto o intorno di
un altro spazio. Nel contesto dell'analisi differenziale l’omeomorfismo è definito tra una varietà e uno spazio euclideo
e la sua esistenza è sufficiente che sia locale.
La bidirezionalità della relazione si concretizza in due funzioni tra loro inverse che mettono in corrispondenza biunivoca
i punti della varietà con i punti di uno spazio euclideo Rn.
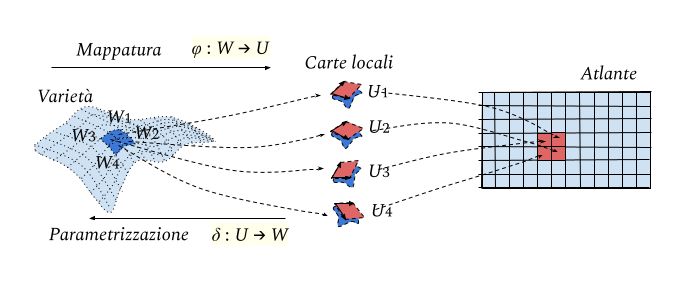
La mappatura (mapping) è la funzione f : M → R. L’immagine della funzione è detta mappa o
carta coordinata di M. Non sempre è possibile con un’unica funzione (con un’unica carta) mappare un intero spazio
senza che si ottengano punti con coordinate a valoti degeneri (infiniti o indefiniti). Per ovviare a questo inconveniente
si ricorre a più mappe, ognuna relativa a una porzione di M. Se due mappe si sovrappongono, anche solo
parzialmente, ossia mappano entrambe una stessa porzione della varietà, sono dette compatibili. L'unione di tutte le
mappe legate da una concatenazione di compatibilità e che copra l'intera varietà, genera quello che si definisce
atlante, ossia la mappatura dell'intera varietà M.
Affinché la mappatura sia il più attendibile possibile, la geometria differenziale estremizza il concetto di mappatura,
applicandolo a intorni infinitesimi di M e generando carte coordinate a loro volta infinitesime. Una funzione di
mappatura viene fatta agisce non sulla varietà intera, ma su in intorno di un punto di questa.
φ : W → U W⊂M ∧ U⊂R
I due spazi sono descritti da sistemi di coordinate diverse. La mappatura è quindi da considerarsi al pari di una
trasformazione di coordinate.
Dato un intorno W di una varietà M2 tale che W(μ1,μ2), la sua
mappatura in un intorno di ℝ2, U(x1,x2), è la funzione parametrica:
φ(x1(μ1,μ2),x2(μ1,μ2))
In questo contesto denominiamo la carta coordinata U(φ) come sistema di coordinate espresso in
ℝn, ma descrivente un intorno W.
La parametrizzazione è la funzione f : R → M, risulta quindi essere l’inversa della mappatura.
Dato un intorno U di uno spazio ℝ2(x1,x2), la sua
parametrizzazione in una varietà M2 tale che W(μ1,μ2) è la funzione:
φ−1 = δ(μ1(x2,x1),μ2(x1,x2))
Denominiamo come intorno coordinato (coordinate neighborhood) l’intorno W(δ) in M generato dalla
parametrizzazione.
L'omeomorfismo è un legame che viene costruito geometricamente attraverso proiezioni dalla varietà Mm a Rn ovvero mediante formule trigonometriche. Questo presuppone la presenza di uno spazio contenitore, esterno ai due spazi dal quale osservare e sul quale operare. Portando questa analisi nel contesto fisico di spazio non possiamo ammettere che esista un spazio esterno allo spazio reale. Mappatura e parametrizzazione divengono operatori matematici perdendo il loro significato geometrico. Lo stesso varrà per vettori e spazi tangenti che pur mantenendo il nome non potranno essere intesi come elementi geometrici del reale in quanto esterni a esso.
Due mappe contigue di un atlante possono avere una intersezione non nulla (possono sovrapporsi parzialmente). Questo significa che esiste un intorno della varietà descritto da due mappe. Essendo queste, per definizione, sistemi di coordinate su spazi euclidei, esiste una funzione di transizione tale da eseguire la conversione di coordinate tra le due mappe. Date due omeomorfismi φ1 e φ2 definiamo la funzione di transizione:
φ1 ୦ φ2−1
Questa funzione se differenziabile (vedi le proprietà sopra richieste allo spazio topologico per essere considerato
una varietà) permette lo studio della variazione delle coordinate delle mappe spostandosi dall'una all'altra. Il che
corrisponde all'analisi di cosa comporta in termini di coordinate uno spostamento nella varietà.
Una varietà è differenziabile se presenta un atlante formato da mappe continue e differenziabili. Se è la differenziabilità
si estende fino al grado k, la struttura di dice Ck differenziabile. Noi assumeremo che le
varietà siano strutture lisce (smooth), ossia C∞ differenziabili.
Una funzione di transizione può esistere anche tra due mappe riferite a intorni posti su varietà diverse. Possiamo
assumere che se esiste una relazione tra le due mappe allora deve esistere una funzione di transizione tra i due
intorni. Se la funzione di transizione tra le due mappe è Ck differenziabile, allora lo è anche la
funzione tra i due intorni delle due varietà. Quest'ultima se biunivoca (se vale anche la relazione inversa) allora è
detta diffeomorfismo. Se per ogni punto di una varietà M esiste un diffeomorfismo con un punto di una
varietà N allora possiamo dire che le due varietà sono tra loro diffeomorfe che significa equivalenti per la
geometria differenziale.
Il concetto di omeomorfismo locale garantisce l'esistenza di un intorno di un qualsiasi punto P di una varietà,
M, sufficientemente piccolo da poter essere approssimato e quindi mappato in uno spazio euclideo. Questo
significa che la struttura di coordinate definita nell'intorno del punto P non è "aderente" alla varietà, ma a uno
spazio euclideo ad essa tangente in P. Ciò che realmente viene mappato è questo spazio tangente:
TP(M).
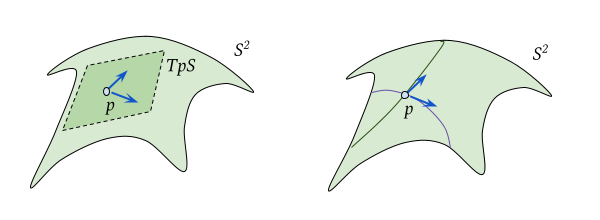
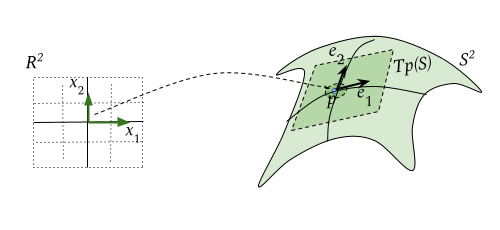 In uno spazio tangente la scelta della base locale di coordinate è arbitraria. Lo stesso vale per la mappatura adottata.
L'unica condizione è che data una qualsiasi coppia di basi, una della varietà e una della mappa deve esistere una
funzione biunivoca che le metta in relazione.
In uno spazio tangente la scelta della base locale di coordinate è arbitraria. Lo stesso vale per la mappatura adottata.
L'unica condizione è che data una qualsiasi coppia di basi, una della varietà e una della mappa deve esistere una
funzione biunivoca che le metta in relazione.
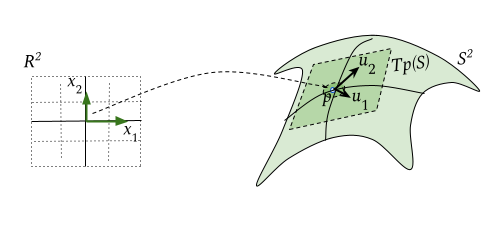 Nell'immagine lo spazio tangente è un piano in quanto riferito a una varietà bidimensionale. In spazi con un maggiore
numero di dimensioni anche lo spazio tangente possiede dimensioni in un numero superiore.
Nell'immagine lo spazio tangente è un piano in quanto riferito a una varietà bidimensionale. In spazi con un maggiore
numero di dimensioni anche lo spazio tangente possiede dimensioni in un numero superiore.
Lo spazio tangente è definibile per ogni punto di una varietà. L'insieme di tutti gli spazi tangenti i punti di una varietà
genera a sua volta uno spazio che chiamiamo fibrato tangente.
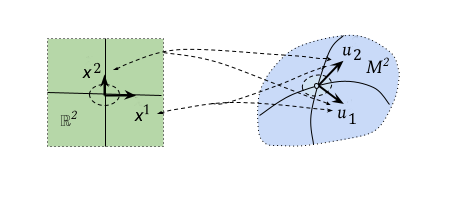
Le funzioni mappanti o parametrizzanti definiscono una relazione statica tra i punti della varietà M e i punti di
uno spazio Rn. Ciascuno dei due spazi ha una propria base di coordinate per rappresentare i propri punti,
ui per la varietà e xj per lo spazio eucliedeo.
A questo punto possiamo aggiungere una relazione dinamica. Quanto varia un differenziale du nella varietà, in conseguenza
a una variazione dx nella mappa correlata. Le variazioni sono determinate su una variabile indipendente detta parametro
affine. Possiamo considerare come parametro il tempo du(t) e dx(t).
dui = Jdxj
Non essendoci corrispondenza biunivoca (l'equiorientamento) tra le coordinate ui della varietà e le coordinate xj della mappa la relazione è di forma matriciale, ogni coordinata di uno spazio è in relazione con tutte le coordinate dell'altro spazio. Relazionando i differenziali delle n coordinate di R con le m coordinate di M si ottiene una matrice n×m chiamata Jacobiana.
┌ ┐
│ ∂u1/∂x1 ∂u1/∂x2 ... ∂u1/∂xn │
│ │
│ ∂u2/∂x1 ∂u2/∂x2 ... ∂u2/∂xn │
│ │ = J
│ ... ... ... ... │
│ │
│ ∂um/∂x1 ∂um/∂x2 ... ∂um/∂xn │
└ ┘
Ciascun elemento della matrice esprime un coefficiente di sensibilità (intensità della variazione) di un dato versore
della base locale della varietà a seguito di una variazione di un dato versore della base della mappa.
Moltiplicando ogni coefficiente per la corrispondente variazione dx otteniamo la variazione du. La
somma orizzontale di questi prodotti restituisce per ogni riga della matrice la variazione differenziale misurata
lungo un versore ui della base locale.
∂u1 ∂u1 ∂u1
du1 = ——— dx1 + ——— dx2 + ... + ——— dxn
∂x1 ∂x2 ∂xn
Derivando il differenziale per il parametro affine si ricava la formulazione dei componenti direzionali del vettore tangente la varietà.
dui n ∂ui dxj
——— = ∑ ——— ———
dt j=1 ∂xj dt
La somma dei componenti restituisce il vettore tangente.
 Omettendo per chiarezza espositiva (detta notazione di Einstein) la sommatoria otteniamo la forma:
Omettendo per chiarezza espositiva (detta notazione di Einstein) la sommatoria otteniamo la forma:
dui ∂ui dxj
——— = ——— ———
dt ∂xj dt
∂ui
dui = ——— dxj
∂xj
Da questa formulazione possiamo ricavare come la matrice jacobiana sia il coefficiente di trasformazione tra la base vettoriale della varietà e il suo corrispondente in Rn.
dui = Jijdxj
u = Jx
Geometricamente un vettore tangente è un elemento dello spazio tangente che in uno spazio curvo non appartiene alla
varietà, ma ne fuoriesce. Risulta quindi opportuno adottare una nuova interpretazione per il vettore tangente.
 Consideriamo quindi la derivata di uno spostamento in una varietà solo come un operatore applicato a un differenziale,
anche se per affinità mantiene il nome di vettore tangente. Scostandosi quindi dalla notazione vettoriale consideriamo
du come un tratto di una curva (di una traiettoria) nello spazio e poniamo questa curva sia descritta da una
funzione liscia f(t). La funzione è da considerarsi composta da una funzione c(t) descrivente
una traiettoria nella varietà a cui viene applicata una funzione φ(u) mappante in Rn.
Il vettore tangente diviene un operatore matematico applicato a una funzione liscia f=φ୦c.
Consideriamo quindi la derivata di uno spostamento in una varietà solo come un operatore applicato a un differenziale,
anche se per affinità mantiene il nome di vettore tangente. Scostandosi quindi dalla notazione vettoriale consideriamo
du come un tratto di una curva (di una traiettoria) nello spazio e poniamo questa curva sia descritta da una
funzione liscia f(t). La funzione è da considerarsi composta da una funzione c(t) descrivente
una traiettoria nella varietà a cui viene applicata una funzione φ(u) mappante in Rn.
Il vettore tangente diviene un operatore matematico applicato a una funzione liscia f=φ୦c.
dui n ∂ dxj
——— = ∑ (——— ———)f
dt j=1 ∂xj dt
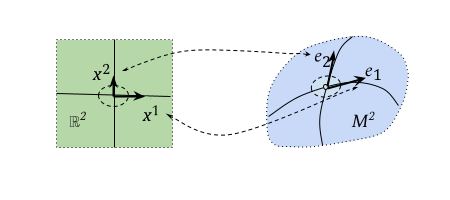
Gli elementi di una matrice jacobiana possono essere associati anche per colonna. Lungo le colonne vengono sommate le variazioni che il differenziale di una una specifica coordinata xk della mappa induce in tutte le variabili ui della varietà. Queste variazioni sono considerabili come vettori componenti di un vettore ek. Quest'ultimo rappresenta la coordinata nella varietà in corrispondenza biunivoca con una coordinata della mappa. Possiamo dire che le coordinate xk e ek indicano la stessa direzione, anche se in due spazi diversi.
┌ ┐
│ ∂u1/∂x1 │
│ │
│ ∂u2/∂x1 │
│ │ = ∂ui/∂x1 = ∂1ui = e1
│ ... │
│ │
│ ∂um/∂x1 │
└ ┘
La jacobiana calcolata su una coordinata associata risulta essere una matrice quadrata diagonale avente come elementi non nulli i versori della base associata.
┌ ┐
│ ∂e1/∂x1 0 . 0 │
│ │
│ 0 ∂e2/∂x2 . 0 │
│ │ = Je
│ . . . . │
│ │
│ 0 0 . ∂en/∂xn │
└ ┘
[e1 + e2 + ... + en] = Je
Chiamiamo base associata la base nella varietà, formata dalle coordinate ei, la cui mappatura
in Rn è la base xj. Tra le due basi è presente una corrispondenza biunivoca. Questo
comporta che esse siano uguali anche in numero.
 Il vettore tangente espresso nelle coordinate di una base associata e in notazione di Einstein diviene:
Il vettore tangente espresso nelle coordinate di una base associata e in notazione di Einstein diviene:
dui ∂ui dxj
—— = ——— —— = eiẋj
dt ∂xj dt
Un qualsiasi vettore appartenente allo spazio tangente una varietà è quindi esprimibile con la formula differenziale:
dui = eidxj
Utilizzando i versori della base associata come coefficienti possiamo rappresentare i vettori di uno spazio tangente in coordinate euclidee. Essendo queste coordinate di mappatura, la loro scelta è arbitraria.
La matrice jacobiana può essere definita sul differenziale di una varietà rispetto a se stesso o rispetto al un identico differenziale di uno spazio identico. La matrice che ne risulta è quadrata e ha elemento unitario lungo la diagonale maggiore dove i=j (es. ∂x1/∂x1=1). Dato che le coordinate di uno stesso spazio sono per definizione tra loro indipendenti in tutte le altre posizioni della matrice dove i≠j abbiamo un valore nullo.
┌ ┐
│ 1 0 . 0 │
│ │
│ 0 1 . 0 │
│ │ = δji
│ . . . . │
│ │
│ 0 0 . 1 │
└ ┘
L'utilizzo di una base di Kronecker equivale a utilizzare una base associata avente versori ei. Ne consegue che il vettore tangente è misurato lungo la sua stessa direzione. La sua descrizione si semplifica in una semplice derivata eucliedea.
dei ∂ei dxj
—— = ——— —— = eiẋj
dt ∂xj dt
dei dxj
—— = 1 —— = ẋj
dt dt
La matrice unitaria permette di modificare un indice con un altro, che per definizione del delta ha pari dimensione.
δjiuj = ui
┌ ┐ ┌ ┐ ┌ ┐
│ 1j(1)i(1) 0 │ │ uj(1) │ │ ui(1) │
│ │ │ │ = │ │
│ 0 1j(2)i(2) │ │ uj(2) │ │ ui(2) │
└ ┘ └ ┘ └ ┘
Abbiamo definito una relazione tra i versori di una base di una mappa e quelli di una base associata di una varietà. Lavorando sempre su intorni infinitesimi possiamo estrarre dai versori i loro differenziali aventi ciascuno l'espressione (a sommatorie implicite):
dui/dxj = ei
Calato in uno spazio vettoriale il differenziale di una coordinata è un vettore e il suo modulo una distanza. Avere una
funzione che permette di calcolare la distanza in un intorno di una varietà significa poterne definire la metrica che
ricordiamo essere un elemento caratterizzante gli spazi topologici.
Per calcolare il valore del differenziale possiamo utilizzare la proprietà di uguaglianza tra il quadrato del
modulo di un vettore e il prodotto scalare del vettore con se stesso (anche se il vettore è lo stesso differenziamo la
notazione degli indici). Esprimiamo l'uguaglianza in notazione di Einstein, rendendo implicita la sommatoria sugli indici.
d2 = |du|2 = <dui,duj>
d2 = <eidxi, ejdxj>
Rendiamo espliciti gli elementi della sommatoria.
d2 = <(e1dx1 + e2dx2 + ... + endxn), (e1dx1 + e2dx2 + ... + endxn)>
Per la proprietà di bilinearità del prodotto scalare possiamo associare ogni elemento del primo termine a ogni elemento del secondo.
d2 = <e1dx1, (e1dx1 + e2dx2 + ... + endxn)> +
<e2dx2, (e1dx1 + e2dx2 + ... + endxn)> +
...
<endxn, (e1dx1 + e2dx2 + ... + endxn)>
d2 = <e1dx1, e1dx1> + <e1dx1, e2dx2> + ... + <e1dx1, endxn> +
<e2dx2, e1dx1> + <e2dx2, e2dx2> + ... + <e2dx2, endxn> +
...
<endxn, e1dx1> + <endxn, e2dx2> + ... + <endxn, endxn>
Essendo i coefficienti dx dei valori scalari possiamo estrarli dal prodotto vettoriale lasciandovi solo i termini vettoriali delle basi.
d2 = dx1dx1<e1, e1> + dx1dx2<e1, e2> + ... + dx1dxn<e1, en> +
dx2dx1<e2, e1> + dx2dx2<e2, e2> + ... + dx2dxn<e2, en> +
...
dxndx1<en, e1> + dxndx2<en, e2> + ... + dxndxn<en, en>
La somma dei prodotti scalari può essere resa più chiara raccogliendo gli elementi di due matrici.
┌ ┐ ┌ ┐
│ dx1dx1 ... dx1dxn │ │ <e1,e1> ... <e1,en> │
│ │ │ │
│ ... ... ... │ │ ... ... ... │
│ │ │ │
│ dxndx1 ... dxndxn │ │ <en,e1> ... <en,en> │
└ ┘ └ ┘
Le matrici sono il risultato di un prodotto vettoriale di un vettore con se stesso. Il vettore dei coefficienti nella prima matrice e il vettore delle basi nella seconda. Possiamo quindi esprimere la distanza nella seguente espressione:
d2 = (dxi⊗dxj)∙(ei⊗ej)
La matrice delle basi viene detta tensore metrico: gij. Risulta equivalente la scrittura che segue, a sommatorie esplicite e implicite.
n
d2 = ∑ dxidxjgij
i,j=1
d2 = dxidxjgij
Gli elementi del tensore metrico, in quanto risultato di un prodotto scalare assumono un valore numerico reale. Questo valore essendo ricavato con il coinvolgimento dell'angolo sotteso tra i due versori esprime il contributo di un versore sulla direzione espressa dall'altro. La matrice del tensore raccoglie i contributi di tutti i versori rispetto a tutte le direzioni da loro espresse.
<ei, ej> = ||ei|| ||ei|| cos(π/2) = 0
<ei, ei> = ||ei|| ||ei|| cos(0) = ||ei||2
Dalla proprietà simmetrica del prodotto scalare consegue che la matrice di un tensore metrico è per costruzione sempre simmetrica rispetto alla sua diagonale principale.
gij = gji
La diagonalizzazione, ossia l'avere nulli i componeneti non presenti sulla diagonale è invece dovuta alla scelta di coordinate tra loro ortogonali (indipendenti) che rendono nullo il loro prodotto scalare.
┌ ┐
│ ||ei||2 ... 0 │
│ │
│ ... ... ... │
│ │
│ 0 ... ||ei||2 │
└ ┘
Indipendentemente dalla base adottata la matrice del tensore metrico è unica e caratterizza lo spazio in un
intorno del punto. Solo in uno spazio omogeneo (come può esserlo una superficie piana
o sferica) il tensore metrico è caratterizzante dell'intero spazio, essendo questo uguale in ogni suo punto.
Ponendo eij=1 con i=j possiamo osservare come la formula della metrica definita in sistema di
coordinate ortogonale va a coincidere con il teorema di Pitagora su n dimensioni. Possiamo esprimerlo in notazione di Einstein.
d2 = dxidxjgij ⟶ d2 = (dxj)2
Il tensore metrico dello spazio euclideo è quindi una matrice quadrata diagonale a valori unitari.
Il tensore metrico gij ha indici covarianti, che seguono con relazione diretta una variazione di base.
┌ ┐
│ g11 ... g1m │
│ │
│ ... ... ... │ = gij
│ │
│ gn1 ... gnm │
└ ┘
Definiamo la corrispondente forma reciproca o controvariante gij.
┌ ┐
│ 1/g11 ... 1/g1m │
│ │
│ ... ... ... │ = gij
│ │
│ 1/gn1 ... 1/gnm │
└ ┘
I componenti della matrice covariante hanno origine dalla relazione: ∂ui/∂xj=ei. Quelli
della matrice controvariante da ∂xj/∂ui=ei. Quest'ultima descrive lo spazio duale della
varietà, ossia lo spazio dove coefficienti e coordinate si invertono di ruolo.
Dato che una matrice è l'inversa dell'altra la loro moltiplicazione restituisce una matrice identità o meglio il delta di Kronecker.
gikgkj = gij = δij
I tensori metrici permettono di innalzare o abbassare un indice di altri tensori (anche non metrici), portandolo dalla forma covariante a quella controvariante e viceversa. Il tensore metrico covariante o controvariante è da applicare nella forma inversa rispetto all'indice da elidere.
gikAi = Ak
gikAi = Ak
AiBi = AigikBk = AkBk
Spieghiamo l'operazione considerando la seguente espressione operante sui versori del tensore metrico e del tensore.
gikAi ⟶ (eiek)ei = (eiek)/ei = ek ⟶ Ai