Attraverso il vettore tangente e lo spazio tangente abbiamo una descrizione di una varietà punto per punto. Importante è anche la comprensione di come variano i vettori tangenti muovendosi da un punto a un altro. Tornando all'esempio della particella in moto inerziale si andrebbe a misurare un'eventuale variazione di velocità nel passaggio da un punto a un altro. Una eventuale differenza sarebbe dovuta allo spazio non lineare. Infatti sappiamo che due vettori tangenti in due punti diversi di una varietà appartengono a due spazi tangenti diversi. Questo significa che uno stesso vettore spostandosi da un punto a un'altro viene espresso con coordinate diverse. Se su questo vettore non agiscono altre componenti esso deve mantenere la stessa lunghezza e gli stessi angoli rispetto alle basi, sia se espresso nelle coordinate del primo spazio tangente che del secondo. La funzione che descrive la variazione di un vettore dovuta al solo trasporto da un punto a un altro della varietà e quindi dovuta alla sola geometria dello spazio è definita funzione di parallelismo.
L'operazione canonica di differenza tra due vettori impone una stessa base di misura e l'applicazione in uno stesso punto.
Attraverso il calcolo differenziale possiamo calcolare la differenza tra due vettori infinitamente vicini, quindi
applicati al limite allo stesso punto. Quello che rimane è definire la funzione di parallelismo, che descrive la variazione
delle basi di uno spazio tangente al variare del punto di applicazione (trasporto).
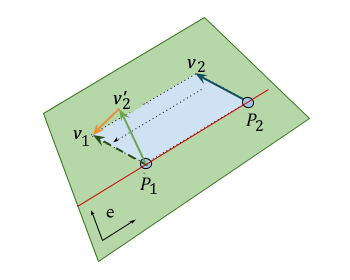
Ricerchiamo la variazione tra i vettori tangenti i punti P1 e P2 di una varietà.
Poniamo i due punti infinitamente vicini.
In uno spazio piano il trasporto parallelo è una funzione lineare data dalla distanza ds=P2−P1.
Essendo nella derivazione ds⟶0 il traporto parallelo è omesso nella formulazione della derivata, nella quale si
opera direttamente sulla differenza vettoriale dv.
 In uno spazio curvo ogni vettore tangente in un punto diverso è definito su piano tangente diverso e quindi descritto
utilizzando una una base di coordinate differente. Il concetto di parallelismo si mantiene convertendolo nella conservazione
dell'angolo tra l'elemento (retta, vettore) e la direzione in cui avviene lo spostamento nel passare da un punto all'altro.
In uno spazio curvo ogni vettore tangente in un punto diverso è definito su piano tangente diverso e quindi descritto
utilizzando una una base di coordinate differente. Il concetto di parallelismo si mantiene convertendolo nella conservazione
dell'angolo tra l'elemento (retta, vettore) e la direzione in cui avviene lo spostamento nel passare da un punto all'altro.
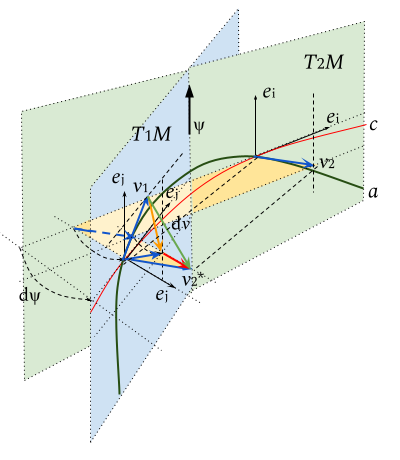
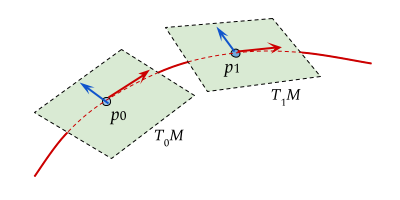 Studiamo il trasporto parallelo su una superficie, cosa che lo rende visualizzabile. Prendiamo una curva c i cui
vettori tangenti i suoi punti sono versori della base associata degli spazi tangenti in questi punti. La variazione
nell'orientamento dei versori descrive la variazione dell'orientamento spazi tangenti.
Studiamo il trasporto parallelo su una superficie, cosa che lo rende visualizzabile. Prendiamo una curva c i cui
vettori tangenti i suoi punti sono versori della base associata degli spazi tangenti in questi punti. La variazione
nell'orientamento dei versori descrive la variazione dell'orientamento spazi tangenti.
Poniamo di confrontare il versore v1 posto nello spazio tangente T1M e il versore
v2 posto nello spazio tangente T2M. Per confrontare i due versori riportiamo
il vettore v2 sul punto P1. Si tratta di trasportarlo parallelamente a se stesso dallo
spazio tangente T2M a quello T1M. La comparazione tra v1 e
il vettore traslato v*2 si traduce in un un vettore ortogonale allo spazio tangente dv.
Il trasporto è scomponibile in una traslazione ds e da una rotazione ψ.
dv = ds + ψ(v1)
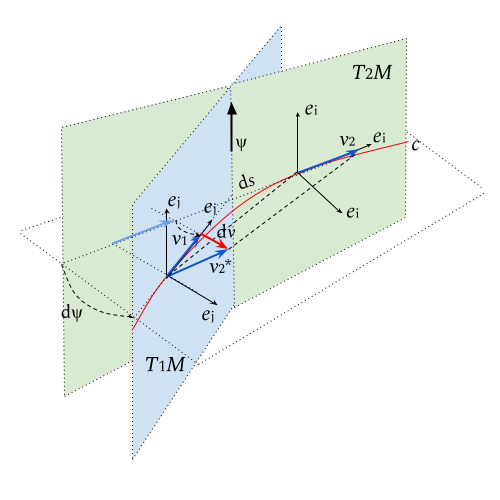
Calcolando la variazione come una derivata, possiamo anche in questo caso trascurare lo spostamento infinitesimo ds. Rimane la differenza tra i due sistemi di riferimento dovuta alla rotazione ψ che matematicamente è esprimibile come un vettore rotazionale posto sull'asse di intersezione dei due spazi tangenti avente come modulo il prodotto vettoriale:
dv = ψ = v1 ∧ v2
Il vettore dv è qui definito come il prodotto del modulo dei due versori per il seno dell'angolo che li separa. Si trova quindi ad essere orientato perpendicolarmente al piano su cui si trovano v1 e ψ.
v1 || T1M
dv ⊥ T1M
Questa perpendicolarità si traduce nell'equazione del parallelismo che afferma la condizione di un prodotto scalare nullo tra il vettore differenziale dei versori e lo spostamento infinitesimo ds. Quest'ultimo si trova infatti nello stesso spazio tangente di ψ
dv∙∂s = 0
Applichiamo il trasporto parallelo ai vettori. Poniamo sullo spazio tangente una base locale ei=∂s/∂xk e scriviamo il vettore v in tale base: v=yjei. Il termine dv viene ad essere il differenziale di un prodotto.
dv = d(yjej) = dyjej + yjdej
Portiamo anche il vettore ∂s in coordinate locali e, ricavando da ei=∂s/∂xk la forma vettoriale ∂s=∂xkek.
Scriviamo l'equazione di parallelismo in notazione di Einstein sostituendo il loro termine con quello dei loro componenti.
dv∙ds = (dyjej + yjdej)∙∂xkek = 0
(dyjej∙ek + yjdej∙ek)∂xk = 0
Dal tensore metrico sappiamo che ej∙ek=gjk.
(dyjgjk + yjdej∙ek)∂xk = 0
Il secondo addendo dell'espressione è di soluzione più complessa. Riscriviamolo moltiplicandolo e dividendolo per ∂xh.
(dyjgjk + yj∂xh(dej/∂xh)∙ek)∂xk = 0
Ci troviamo ad avere il prodotto dei differenziali nelle basi locali dei due vettori yjdxh (quello derivato e quello di derivazione) per dei fattori che consideriamo congiuntamente come un unico coefficiente indicizzato, (dej/∂xh)∙ek. I componenti di questo coefficiente prendono il nome di simboli di Christoffel di prima specie.
Γhj,k = (∂ej/∂xh)∙ek
I coefficienti dei simboli di prima specie misurati lungo i versori della base affine, sono i i simboli di Christoffel di seconda specie.
dej/∂xh = Γihj∙ei
Γhj,k = Γihj∙ei∙ek
Γhj,k = Γihjgik
Γihj = gikΓhj,k
I simboli di seconda specie sono i coefficienti della variazione (espressa in modo vettoriale) dei versori della base
locale nel passaggio da uno spazio tangente a quello prossimo. I due simboli di Christoffel differiscono per il tensore
metrico preso a fattore.
Introduciamo nella funzione del di parallelismo il primo simbolo di Christoffel.
(dyjgjk + yj∂xhΓhj,k)∂xk = 0
Una ulteriore semplificazione si può ottenere passando alla forma covariante, attraverso una moltiplicazione per il tensore metrico controvariante. Andiamo nel primo addendo a trovare il delta di Kronecker (che rappresenta una identità) mentre nel secondo ci imbattiamo nel simbolo di Christoffel di seconda specie.
(dyjgikgjk + yj∂xhgikΓhj,k)∂xk = 0
(dyi + yj∂xhΓihj)∂xk = 0
Il fattore ∂xk rappresenta la base della mappa. Essa è arbitraria e non caratterizza la varietà. Avendo valore sempre positivo possiamo anche matematicamente escluderlo dalla formula.
dyi = −Γihjyj∂xh
L'espressione fornisce la variazione covariante subita dai coefficienti di un vettore controvariante per mantenere
il parallelismo ossia l'angolo rispetto alle basi. Nel caso di uno spazio piatto non è necessaria nessuna variazione nell'orientamento
dei vettori in quanto le basi non ruotano. In tale condizione abbiamo che Γihj=0.
Scriviamo anche la forma applicata a un vettore covariante. Tale forma inverte le coordinate e il segno
del coefficiente. Infatti una funzione con coefficiente angolare (inclinazione) positivo, invertendo le coordinate
risulta avere un coefficiente angolare negativo. La derivata segue la stessa regola.
dyi = +Γjihyj∂xh
Diamo un significato alla formula. Il primo termine esprime la differenza tra il vettore di partenza e il secondo vettore quest'ultimo trasportato parallelamente sul primo. Il secondo termine rappresenta la variazione della base associata dello spazio tangente subita nel passaggio dal punto P1 al punto P2. Se le due variazioni coincidono allora il vettore si è mosso parallelamente alla base associata. Il vettore v2 rispetto alla base ei dello spazio tangente T1M mantiene le stesse distanze angolari del vettore v1 rispetto alla base ej dello spazio tangente T1M. Visti nelle rispettive basi i que vettori sono uguali. La loro differenza è quindi nulla.
Definito il trasporto parallelo applichiamolo a un vettore per determinare la sua variazione a seguito del spostamento infinitesimo lungo un tratto infinitesimo ds di una curva di cui non è obbligatoriamente tangente. I differenziali espressi nella formula del trasporto parallelo possono essere posti in una derivata direzionale che prende il nome di derivata covariante.
Dyi
—— ≡ ∇syi
ds
La derivata covariante riprende l'espressione del trasporto parallelo e la differenzia lungo una curva integrale ds. nella derivazione covariante non viene posta la condizione di nullità dell'espressione. Il vettore trasportato può quindi ritrovarsi in una condizione di non parallelismo. Cade quindi l'uguaglianza dei due termini dell'espressione del parallelismo che riportiamo quindi dallo stesso lato dell'uguaglianza.
dyi ∂xh
∇syi = —— + Γjih yj ——
ds ds
La distanza ds può essere scritta nei suoi componenti vettoriali. Ponendo che si derivi nella stessa direzione del trasporto parallelo abbiamo: ∂s=∂xkek.
dyi ∂xh
∇(xh)yi = —— eh + Γjih yj —— eh
∂xh ∂xh
dyi
∇hyi = (——— + Γjihyj)eh
∂xh
Quella espressa è la generalizzazione della derivata covariante. Si osservi che in uno spazio piatto, Γihj=0
che comporta un'identità tra derivata tradizionale e covariante.
Un'analisi alternativa si può avere interpretando ds in relazione a un parametro affine, alternativo, ammissibile
in quanto linearmente dipendente da s come può esserlo il tempo per percorrere ds o la lunghezza
della corda che sottende ds.
I componenti dyi sono interpretabili come operatori differenziali applicati a una curva a. Esprimiamoli quindi come vettori tangenti la curva lungo la sua direzione di propagazione. In modo analogo poniamo ∂xh/ds come vettore tangente una curva b. Per sostituzione il trasporto parallelo diviene:
d da da db
∇ta = —— —— + Γjih —— ——
ds ds ds ds
Il vettore derivato ha una direzione non obbligatoriamente coincidente con la direzione di derivazione. Ne consegue
che la variazione dei vettori non eguaglia quella dello spazio tangente portando a una derivata covariante non nulla.
Può sussistere il caso che la direzione dei vettori tangenti la curva oggetto di derivazione (il tratto dγ) coincida con
la direzione di trasporto (dλ) ossia il caso in cui a e b siano la stessa curva. Questa uguaglianza significa
che una curva viene derivata lungo se stessa. Condizione che porta la derivata ad avere valore nullo.
d2c dc dc
∇tc = ——— + Γjih —— —— = 0
ds2 ds ds
Il concetto di vettore tangente e spazio tangente a un punto di una varietà ci sono serviti per approssimare il
comportamento della varietà in un intorno infinitesimo del punto. Una visione più ampia su uno spazio più esteso se non
totale della varietà ci è fornita dal campo vettoriale.
Definiamo con tale termine indistintamente sia una funzione di campo che ad ogni punto di uno spazio associa un vettore,
sia l'insieme di questi vettori (che della funzione sono il risultato) esprimendoli con una lettera maiuscola.
In geometria differenziale i vettori dei campi sono generati per differenziazione quindi è dato che siano tangenti.
Seguendo la direzione indicata dai vettori tangenti di un campo vettoriale possiamo creare una curva c che passa via via
da un punto a uno contiguo. Chiamiamo questa linea curva integrale (o integrale di linea) di seconda specie.
Data la definizione deve esistere una funzione di campo X(c) tale che applicata alla curva, assegna a tutti
i suoi punti un vettore tangente.
L'insieme di tutte le curve integrali generate da un campo descrive il flusso del campo. Queste linee hanno la caratteristica
di essere localmente parallele cosa che ne impedisce l'intersezione. Dato un campo vettoriale tangente per ciascun punto
della varietà passa una sola curva integrale di un flusso.
Le curve integrali di un flusso sono matematicamente rappresentabili tramite una funzione f liscia (infinitamente derivabile)
che a una data una posizione iniziale e una coordinata generalizzata (esterna allo spazio, come per esempio il tempo)
associa un punto dello spazio. Un campo integrale è quindi codificabile anche come un operatore di derivazione applicato
a una funzione liscia: X(f).
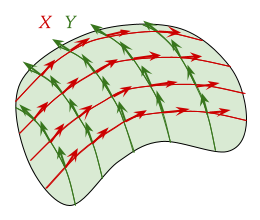
In uno spazio piatto, le curve integrali che vi si possono tracciare sono rettilinee. I vettori tangenti queste curve
sono equiorientati. Se si tracciano curve lungo altre direzioni si ripete la stessa condizione. Definite le proprietà
dello spazio in un intorno di un punto, esse sono invarianti per ogni altro punto e suo intorno dello spazio.
In uno spazio curvo invece questo non accade, la direzione dei vettori tangenti, seguendo la curvatura dello spazio,
si modifica da un punto ad un altro. Tale variazione è influenzata dalla dalla curvatura dello spazio
che non è detto sia identica in ogni direzione (come in una sfera). Acquisisce quindi importanza l'analizzare il
comportamento dei vettori di un campo.
Il campo vettoriale ci permette di concepire la possibilità di applicazione della derivata covariante, in modo massivo
su tutti i vettori di un campo espresso su una varietà. La direzione di derivazione sarà data da un secondo campo vettoriale
(dalle sue curve integrali) ricoprente la stessa varietà. Nasce da qui il concetto di connessione tra due campi vettoriali,
che esprime la variazione (la velocità) dell'uno nel muoversi lungo le curve dell'altro o in altro modo la presenza o meno
di una curvatura di un campo lungo la direzione espressa da un altro campo.
 Rappresentiamo la connessione affine tra un campo derivato Y lungo le direzioni di un campo X con la seguente
notazione:
Rappresentiamo la connessione affine tra un campo derivato Y lungo le direzioni di un campo X con la seguente
notazione:
∇XY
La connessione affine è anch'essa un campo vettoriale, ricoprendo lo stesso spazio dei due campi coinvolti e associando per ogni punto di questo il vettore risultante dalla derivata covariante. Da questa eredita le proprietà proprie della derivazione.
∇X+ZY = ∇XY + ∇ZY
∇fXY = f∇XY
∇X(Y + W) = ∇XY + ∇XW
∇X(fY) = (∇Xf)Y + f(∇XY) regola di Leibnitz
Se rappresentiamo i campi con i vettori che li compongono abbiamo una diversa formalizzazione della connessione.
Y = Yiei
Y = Xjej
∇XY = ∇XjejYiei
Per le proprietà sopra esposte (la 4 e poi la 2) possiamo sviluppare l'espressione come segue.
∇XY = ∇Xjej(Yi)ei + Yi∇Xjej(ei)
∇XY = Xj∇ej(Yi)ei + YiXj∇ej(ei)
Applichiamo i simboli di Christoffel deh/∂xj = Γihj∙ei e riscriviamoli come ∇xjei = Γkji∙ek. Inseriamo i simboli di Christoffel nell'equazione osservando che il termine ej dell'equazione essendo la coordinata di X corrisponde a ∂xj.
∇XY = Xj∇ej(Yi)ei + YiXjΓkjiek
Aggiustando gli indici permette di semplificare l'espressione.
∇XY = Xj(∇ejYk + YiΓkij)ek
∇XY = Xj∇ej(Ykek) + XjYiΓkjiek
∇XY = Xj∇jY + XjYiΓkjiek
Se la connessione affine risultasse nulla significherebbe che i vettori del campo Y sono invarianti nello spostamento lungo la direzione dei vettori del campo X. Si trasportano lungo di esse seguendo il trasporto parallelo dettato dalla geometria dello spazio.
∇XY = 0
Questa condizione in un campo lo definisce come campo parallelo. Gli angoli sottesi tra i suoi vettori e le curve integrali (i vettori) del campo di derivazione sono costanti nello spostamento parallelo.
Dato un campo vettoriale Y e uno X possiamo pensare a una funzione composta che restituisca di Y i
componenti dei suoi vettori orientati nella direzione dei vettori di X.
Esplicitiamo la funzione che descrive la derivazione del campo Y(f) lungo la direzione del flusso del campo X(g).
X୦Y = X(Y(f∙g))
Si osservi come questa operazione misuri la componente lungo la direzione espressa dalla curva integrale g dei
vettori Y orientati lungo f. Si applica quindi il prodotto scalare f∙g=|f||g|cos(a).
Se volessimo che il risultato di questa operazione sia un campo vettoriale tangente, ossia la risultante della derivazione
di una funzione liscia dobbiamo porre il rispetto delle proprietà della derivata come per esempio la regola di Leibniz:
(fg)’ = f’g + fg’. Applichiamo la regola alla derivazione Y(fg) e poi alla
derivazione del risultato per X().
X(Y(f∙g)) = X(fY(g) + gY(f))
X(Y(f∙g)) = fX(Y(g)) + X(f)Y(g) + X(g)Y(f) + gX(Y(f))
Gli addendi centrali sono di troppo, non permettendo il rispetto della regola di Leibniz da parte della funzione composta e quindi la possibilità di considerare l'espressione X୦Y come un campo vettoriale tangente. La simmetria della formula ci viene però in aiuto. Sulle funzioni fg applichiamo in ordine inverso le derivazioni X e Y. Confrontiamo poi quanto ottenuto.
X(Y(fg)) − X(Y(fg))
fX(Y(g)) + X(f)Y(g) + X(g)Y(f) + gX(Y(f))
− fY(X(g)) − Y(f)X(g) − Y(g)X(f) − gY(YX(f))
[fX(Y(g)) + gX(Y(f))] − [fY(X(g)) + gY(YX(f))]
Questa differenza che vede elisi i termini di troppo, viene chiamata derivata di Lie o parentesi di Lie ed è un campo vettoriale.
[X,Y](fg) = X(Y(fg)) − Y(X(fg)) = X୦Y − Y୦X
Le parentesi di Lie godono della proprietà antisimmetrica:
[X,Y] = −[Y,X]
Un’altra interessante proprietà è la identità di Jacobi:
[X,[Y,Z]] + [Y,[Z,X]] + [Z,[X,Y]] = 0
La dimostrazione si ottiene facilmente dalla definizione stessa delle parentesi di Lie che ci permette di scrivere:
[X,[Y,Z]] = X(Y(Z)) − X(Z(Y)) − (Y(Z(X)) − Z(Y(X)))
[Y,[Z,X]] = Y(Z(X)) − Y(X(Z)) − (Z(X(Y)) − X(Z(Y)))
[Z,[X,Y]] = Z(X(Y)) − Z(Y(X)) − (X(Y(Z)) − Y(X(Z)))
Sommando le tre funzioni abbiamo l’annullo di tutti i termini.
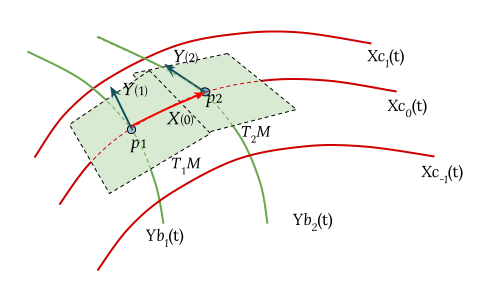
La connessione affine tra due spazi vettoriali definiti su una stessa varietà esprime la velocità di variazione dei vettori di un campo nel muoversi lungo le curve integrali dell'altro. Possiamo invertire il ruolo dei due campi e calcolare la connessione inversa. Confrontiamo queste due connessioni. Se fossero uguali avremmo una equivalenza delle reciproche relazioni (curvature).
∇XY = ∇YX
Spieghiamo l'uguaglianza immaginando un punto P della varietà su cui sussistono un vettore tangente y e un
vettore tangente x, appartenenti rispettivamente al campo vettoriale Y e X. Applicando l'operatore di
connessione affine tra i due campi il vettore y viene trasportato lungo un vettore x conducendo al punto Q.
Dal P consideriamo un operatore simmetrico che trasporta il vettore x lungo y. Se anche in questo caso
si giunge a Q la connessione affine tra i due campi vettoriali è simmetrica.
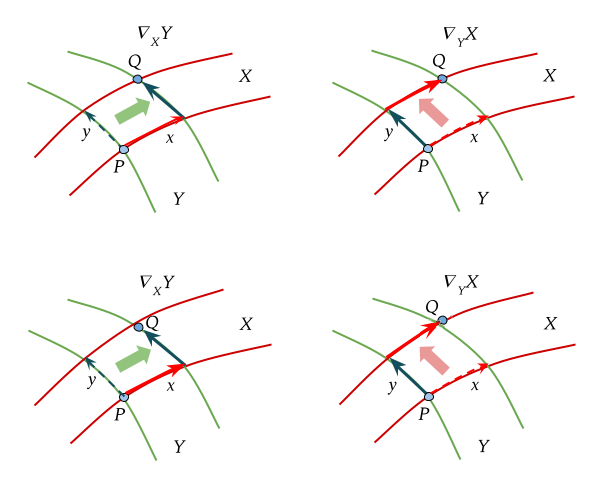 Geometricamente interpretiamo la simmetria della connessione tra i campi vettoriali con un uguale curvatura dell'uno rispetto
all'altro. Lo spazio si deforma in modo omogeneo risultando privo di torsione.
In questo caso i campi vettori del campo Y si muovono parallelamente lungo X e viceversa significa che le relative
connessioni affini sono nulle e quindi lo spazio è di conseguenza privo di torsione. Abbiamo anche che
l'angolo tra i vettori dei due campi rimane costante seguendo il trasporto parallelo.
Geometricamente interpretiamo la simmetria della connessione tra i campi vettoriali con un uguale curvatura dell'uno rispetto
all'altro. Lo spazio si deforma in modo omogeneo risultando privo di torsione.
In questo caso i campi vettori del campo Y si muovono parallelamente lungo X e viceversa significa che le relative
connessioni affini sono nulle e quindi lo spazio è di conseguenza privo di torsione. Abbiamo anche che
l'angolo tra i vettori dei due campi rimane costante seguendo il trasporto parallelo.
Definita la condizione di torsione nulla poniamo il caso di presenza di una torsione e ricerchiamo un indice che applicato
a una varietà ne esprima il grado.
T(X,Y) = ∇XY − ∇YX
Sviluppiamo in questa differenza le derivate covarianti.
∇XY − ∇YX = Xj∇ej(Ykek) + YiXjΓkjiek
− Yi∇ei(Xkek) − XjYiΓkijek
∇XY − ∇YX = Xj∇ej(Ykek) − Yi∇ei(Xjek)
+ YiXjΓkjiek − XjYiΓkijek
∇XY − ∇YX = X୦Y − Y୦X
+ YiXj(Γkji − Γkij)ek
∇XY − ∇YX = [X,Y]
+ YiXj(Γkji − Γkij)ek
∇XY − ∇YX − [X,Y] =
YiXj(Γkji − Γkij)ek
Avendo due espressioni equivalenti esprimiamo il tensore di torsione in due modi.
T(X,Y) = ∇XY − ∇YX − [X,Y]
T(X,Y) = YiXj(Γkji − Γkij)ek
Dalla prima espressione osserviamo come la differenza tra due connessioni inverse di campi viene confrontata con la parentesi di Lie dei campi
coinvolti. Se la differenza tra due connessioni eguaglia (compensa) la parentesi di Lie abbiamo uno spazio localmente privo di torsione.
Dalla seconda formula abbiamo che la torsione dipende dai coefficienti di Christoffel. Una loro simmetria significa una
torsione nulla. In generale se due derivate covarianti sono simmetriche la loro differenza è quindi nulla come nulla è la
loro parentesi di Lie e il tensore di torsione ad esse collegato.
Uno spazio piatto avendo i simboli di Christoffel nulli è sempre a torsione nulla.
Il tensore di torsione gode della proprietà antisimmetrica. La proprietà è ereditata dall'antisimmetria della parentesi di Lie.
∇XY − ∇YX − [X,Y] = −∇XY + ∇YX + [X,Y] =
= ∇YX − ∇XY − [Y,X]
T(X,Y) = − T(Y,X)
Proviamo ora a definire i caratteri del trasporto parallelo non di un vettore, ma dello spazio tangente, o meglio della
metrica in esso definita. In questo modo si può descrivere la variazione subita dai versori delle basi, dalle coordinate, durante
un trasporto parallelo.
La derivata covariante è applicabile non solo ai vettori, ma a qualunque oggetto geometrico che accetti un cambio di coordinate
che garantisca l'invarianza del prodotto coefficiente per base.
Data questa comune proprietà fondamentale per la derivazione possiamo pensare ad applicare la derivata covariante anche al
tensore metrico di uno spazio tangente. Per estensione si può pensare alla connessione affine tra il campo formato dai tensori
metrici di ogni punto di una varietà e un campo direzione espresso da vettori tangenti le curve integrali del campo.
Questa particolare connessione affine viene detta connessione di Levi-Civita.
Prendiamo un campo Y che assegna ad ogni punto della varietà una distanza dy2 definita da componenti
direzionali. Applichiamo al campo Y una connessione affine rispetto a un campo X anch'esso
ricoprente la medesima varietà.
∇XS
Operiamo a livello di singolo vettore del campo Y. Rappresentiamo la distanza espressa dal vettore come derivata covariante della funzione della metrica.
∂xk(eiejdyidyj)
∂xk(gijdyidyj)
Nella seconda espressione abbiamo utilizzato per esprimere la distanza la formula della metrica.
Applichiamo il postulato che una distanza non modifichi il suo modulo nel trasporto parallelo nello spazio. I componenti direzionali
del vettore che la esprime si modificano nello stesso modo con cui variano le basi dello spazio tangente. La derivata
direzionale dei vettori distanza, e la connessione affine del campo che li raccoglie hanno per definizione valore nullo.
∂xk(gijdyidyj) = 0
Al triplo prodotto applichiamo la regola di Leibnitz.
∂xk(gij)dyidyj + gij∂xk(dyi)dyj + gijdyi∂xk(dyj) = 0
Applichiamo alle coordinate i simboli di Christoffel: ∂xk(dyi) = Γhikdyh in questo caso però da adottare in forma controvariante ∂xk(dyi) = −Γikidyi .
∂xk(gij)dyidyj −
ghj(Γhikdyi)dyj −
gih(Γhjkdyj)dyi = 0
(∂xk(gij) −
ghjΓhik −
gihΓhjk)dyidyj = 0
I differenziali dyidyj sono sempre maggiori di zero. Consegue che la connessione è di Levi-Civita, indipendentemente dai valori da loro espressi.
∂xk(gij) −
ghjΓhik −
gihΓhjk = 0
∂xk(gij) =
ghjΓhik +
gihΓhjk
Questa semplice espressione raccoglie cinque fattori, ciascuno espressione di una funzione che esprime una derivata, un tensore, ....
Ciascuna funzione è una sommatoria di Einstein su tre indici. Ponendo uno spazio bidimensionale dove ogni indice si sviluppa
su due valori, atteniamo che ciascun fattore è composto da 23=8 funzioni, per un totale complessivo di 40.
Proseguiamo ricordiamo la relazione tra simboli di Christoffel di prima e seconda specie: Γki,j = ghjΓhik
∂xk(gij) = Γki,j + Γkj,i
Abbiamo qui definito la identità di Ricci che esprime la proprietà fondamentale di una connessione di Levi-Civita.
Per come abbiamo configurato la connessione di Levi-Civita i differenziali xk, yi, yj
sono posti sullo stesso spazio tangente. Possiamo quindi ruotare i ruoli delle coordinate invertendo i campi X e Y.
Essendo di Y utilizzati due versori, abbiamo una espressione inversa, composta da due termini, uno che inverte
su ei e l'altro su ej.
Troviamo l'identità di Ricci per entrambi i componenti.
∂yi(gkj) = Γik,j + Γij,k
∂yj(gik) = Γji,k + Γkj,i
L'identità di Ricci deve valere contemporaneamente per tutte e tre le connessioni di Levi-Civita. Poniamo inoltre che debba rispettare la condizione di torsione nulla dello spazio, ossia la simmetria tra le connessioni inverse.
∂xk(gij) − ∂yi(gkj) + ∂yj(gik) = 0
Applicando a questa condizione di torsione nulla le identità di Ricci delle tre connessioni otteniamo un espressione che ricalca l'identità di Jacobi.
∂xk(gij) − (Γki,j + Γkj,i) =
∂yi(gkj) − (Γik,j + Γij,k)
+ ∂yj(gik) − (Γji,k + Γkj,i) = 0
∂yi(gkj) + ∂yj(gik) − ∂xk(gij) =
Γik,j + Γij,k + Γji,k + Γkj,i − Γki,j − Γkj,i = 2Γij,k
Questa espressione prende il nome di formula di Koszul. Da essa possiamo ricavare la formulazione dei simboli di Christoffel in una connessione di Levi-Civita.
Γij,k = (1/2)[∂yi(gkj) + ∂yj(gik) − ∂xk(gij)]
Γij,kgkl = (1/2)gkl[∂yi(gkj) + ∂yj(gik) − ∂xk(gij)]
Γlij = (1/2)gkl[∂i(gkj) + ∂j(gik) − ∂k(gij)]
Nell'ultima equazione abbiamo adottato una notazione compatta che rende implicita la variabile di derivazione lasciandone indicato solo l'indice: ∂yi(g)⟶∂i(g)
Dalla topologia sappiamo che la formula che definisce di calcolo delle distanze in uno spazio lo caratterizza. Lo studio per intorni di un punto di una varietà ci permette di avere una definizione locale euclidea di distanza. Chiamiamo questa sua espressione locale (o infinitesima) elemento di linea. Distanze superiori sono ottenibili per integrazione. Integrando gli elementi di linea calcolati lungo ogni punto di una curva congiungente due due punti di una varietà si può ottenere il valore della loro distanza.
Q
S = ∫ ds
P
Tra le linee che si possono tracciare nella varietà per collegare due suoi punti, la linea di minore
lunghezza è chiamata geodetica. In uno spazio piatto tale linea è retta, mentre in uno curvo abbiamo una linea curva.
Consideriamo un parametro λ (come l'ascissa curvilinea) che differenzia una curva dall'altra. Variando λ variano localmente
le direzioni degli elementi di linea che sommati portano a differenti lunghezze di S. Possiamo affermare che la
geodetica possiede il valore di α che determina la curvatura minima possibile in una data varietà, che coincide con con la
curvatura della varietà stessa.
La parametrizzazione ci permette di derivare gli elementi di linea. Definita la funzione liscia L(λ) dallo studio
di funzione sappiamo che dove la derivata è nulla si ha un suo punto di massimo o minimo. Avendo la lunghezza di una
curva congiungente due punti un limite minimo, ma non massimo possiamo, possiamo considerare la condizione di derivata
nulla come sufficiente per affermare che una curva è geodetica.
Q
δS = δ⎰ ds = 0
P
Sostituiamo nell'integrale il termine di distanza con la funzione metrica e applichiamo una sostituzione di coordinate.
dS xQ
—— = δ⎰ (gijdxidxj)1/2 = 0
dλ xP
dS λQ dxi dxj
—— = δ⎰ (gij ——— ———)1/2dλ = 0
dλ λP dλ dλ
Prendiamo in considerazione un contesto fisico nel quale le possibili curve sono traiettorie percorribili da una particella. In un contesto inerziale una traiettoria lunga comporta più tempo e quindi più energia per percorrerla. Non si commette quindi errore nel sostituire l'argomento dell'integrale, l'elemento di linea con una lagrangiana esprimente l'energia della particella e ponendo come parametro di derivazione il tempo. Le curve non sono più distinte per lunghezza, ma per energia spesa parametrata al tempo impiegato data una velocità, da una particella inerziale a percorrerle. La geodetica da percorso più corto diviene quello che impiega il minor tempo.
tQ
δE = δ⎰ Ldt = 0
tP
Ricordiamo l'espressione della lagrangiana in funzione della velocità v e della distanza x che si traduce nel sistema di equazioni di Eulero-Lagrange.
d ∂L ∂L
——(—— ) − —— = 0
dt ∂vh ∂xi
L'uguaglianza se vera per L lo è anche per Ln. Questo ci permette di adottare la sostituzione semplificata (trascurando la radice quadrata) L=gij(dxi/dt)(dxj/dt). Calcoliamo i termini ricordando che v e a sono rispettivamente la derivata temporale prima e seconda di x.
∂L ∂(gijvivj)
—— = ————————— = gij(vi/vh)vj + gijvi(vj/vh) =
vh vh
gijδikvj + gijviδjk =
ghjvj + gihvi = 2ghjvj
Deriviamo temporalmente ricordando che g è funzione di x e quindi nella derivazione è da considerarsi come g(x) la cui derivata risulta essere ∂g(x)∂x.
d
——(2ghjvj) = 2∂tghjvkvj + 2ghjaj
dt
Sviluppiamo il secondo termine.
∂L ∂(gijvivj)
—— ( ————————— ) = ∂(xh)gijvivj
xh xh
Prendiamo i termini ottenuti e ricomponiamo le equazioni di Eulero-Lagrange. Sostituiamo la derivata temporale della velocità con il termine a indicante un'accelerazione.
2∂tghjvkvj + 2ghjaj − ∂(xh)gijvivj = 0
Approfittiamo dell'uguaglianza a zero per condurre la formula verso una espressione a noi utile. Dividiamo ogni membro per due e sdoppiamo il primo termine.
∂tghjvkvj + ghjaj −
(1/2)∂(xh)gijvivj = 0
(1/2)∂tghjvkvj + (1/2)∂tghjvkvj +
ghjaj −
(1/2)∂(xh)gijvivj = 0
Raccogliamo e rinominiamo opportunamente gli indici andando a scoprire all'interno dell'espressione una soluzione per i simboli di Christoffel di prima specie per una connessione di Levi-Civita. Quindi si dimostra che la geodetica ricopia il trasporto parallelo della base dello spazio tangente.
ghjaj + (1/2)(∂tghj + ∂tghk
− ∂(xh)gij)(vkvj) = 0
ghjaj + Γkj,h(vkvj) = 0
Moltiplichiamo per il tensore metrico controvariante.
ghighjaj + ghiΓkj,h(vkvj) = 0
ai + Γikjvkvj = 0
Siamo arrivati a questa espressione ponendo una derivazione temporale: λ=t. Nel caso scegliessimo un parametro spaziale s (come la lunghezza della corda tra due punti) la formula non esprimerebbe più la traiettoria di una particella in uno spazio curvo, ma l'andamento stesso dello spazio.
d2xj dxk dxj
∇sc = ——— + Γikj —— —— = 0
ds2 ds ds
Abbiamo ritrovato l'espressione finale del paragrafo del vettore covariante, dimostrando come la geodetica sia una curva che se trasportata su se stessa porta a derivate covarianti nulle in ogni suo punto, ossia all'invarianza dei suoi vettori tangenti nel trasporto parallelo. Ampliando questo concetto ai campi possiamo affermare che è nulla la connessione di un campo geodetico con se stesso.
∇cc = 0
In un intorno di un punto di una varietà i vettori tangenti le geodetiche possono essere utilzzati come versori per formare una base di uno spazio tangente. Tali versori seguendo il trasporto parallelo generano un tensore metrico di Kronecker. Consegue che si annulla la derivata dei componenti del tensore e di conseguenza dei simboli di Christoffel che vanno a comporre.
∂tghj = 0
Γikj = 0
L'utilizzo di una base geodetica è un caso particolare che ha il pregio di semplificare notevolmente le formulazioni.