Da quanto fin qui analizzato la curvatura di una varietà è un carattere fondamentale per definire la metrica e quindi le proprietà di questa. Cerchiamo degli indicatori che esprimano il grado di curvatura locale di una varietà.
L'operatore di connessione affine applicato su due campi vettoriali ne restituisce un terzo che ne esprime la derivazione dell'uno rispetto all'altro. Possiamo quindi concepire di applicare la connessione a questo campo risultante, coinvolgendo un secondo campo direzionale (di derivazione).
∇X(∇YZ)
Qui non intendiamo derivare due volte i vettori di un campo lungo una data direzione bensì vogliamo derivarli lungo una direzione e
poi il vettore risultato lungo un'altra direzione. Si va a ottenere una composizione di due derivate successive calcolate
su due campi distinti (direzioni).
Per la regola di Leibniz sulla derivata di funzioni composte abbiamo:
∇X(∇YZ) = (∇X∇Y)(Z) + ∇Y(∇XZ)
∇X(∇YZ) − (∇X∇Y)(Z) = ∇2X,Y(Z)
Possiamo applicare la formula ai soli versori delle basi, leggendo le sole variazioni di queste. La focalizzazione sulle basi ci permette di applicare la sostituzione: ∇xjei=Γkjiek. Alleggeriamo l'espressione passando da una notazione per variabili della connessione per indici. ∇j∂i=Γkji∂k
∇2i,j∂k = ∇i(∇j∂k) − (∇i∇j)∂k
∇2i,j∂k = ∇i(Γhjk∂h) − ∇iΓrjk∂r
∇2i,j∂k = ∇i(Γhjk∂h) − ΓhjrΓrik∂h
La curvatura si può rilevare dal diverso orientamento di due spazi tangenti o in modo equivalente dal diverso orientamento di due vettori tangenti una geodetica. Possiamo quantificare, indicizzare, questo scostamento tramite l'angolo φ sotteso i due spazi o i due vettori. Dato che in uno spazio curvo la differenza angolare aumenta con la distanza, definiamo l'angolo su distanze infinitesime, in modo coerente con l'analisi locale.
K = ∂φ/∂c
Consideriamo l'hessiano come un'accelerazione dei versori di un piano tangente, come un indice della variazione
(della curvatura) di un campo.
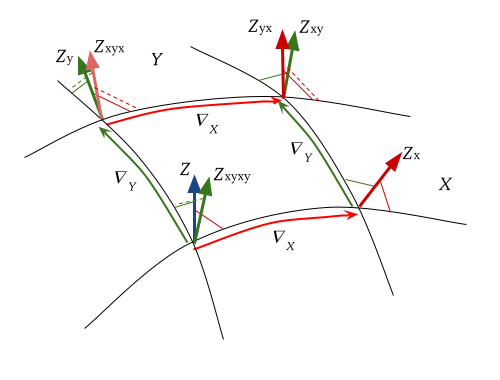
Consideriamo due hessiano l'uno inverso dell'altro nell'ordine di applicazione degli operatori.
∇2X,Y(Z) = ∇2Y,X(Z)
Questa espressione applicata a un singolo versore z può essere interpretata come il confronto tra
i due vettori zxy e zyx risultanti da percorsi di derivazione simmetrici,
caratterizzati da una inversione nell'ordine di applicazione degli stessi operatori di derivazione.
Un'interpretazione alternativa considera due derivate seconde identiche, ma applicate su direzioni opposte. Abbiamo in
questo caso un circuito che riporta al punto di partenza. La differenza è misurata tra il vettore iniziale z e
quello finale zxyxy.
Esprimiamo le due derivate seconde inverse riprendendo la formulazione del paragrafo precedente.
∇2X,Y(Z) = ∇X(∇YZ) − (∇X∇Y)(Z)
∇2Y,X(Z) = ∇Y(∇XZ) − (∇Y∇X)(Z)
Riscriviamo la loro differenza utilizzando queste espressioni.
(∇X(∇YZ) − (∇X∇Y)(Z)) − (∇Y(∇XZ) − (∇Y∇X)(Z))
(∇X(∇YZ) − ∇Y(∇XZ)) − ((∇X∇Y)(Z) − (∇Y∇X)(Z)))
Riconosciamo nella sottrazione tra il terzo e il quarto termine una parentesi di Lie.
R(X,Y)Z = ∇2X,Y(Z) − ∇2Y,X(Z)
R(X,Y)Z = ∇X(∇YZ) − ∇Y(∇XZ) − [∇X,∇Y](Z)
Un tensore di Riemann nullo con azzeramento della sola parentesi di Lie implica una simmetria delle derivate seconde.
∇X(∇YZ) = ∇Y(∇XZ)
Una notazione equivalente, per indici, del tensore di curvatura, è possibile scrivendo l'espressione come sottrazione di due hessiani.
(∇i(Γhjk∂h) − ΓhjmΓmik∂h) − (∇j(Γhik∂h) − ΓhimΓmjk∂h)
Considerando solo la parte dell'operatore applicato al versore ∂h definiamo il tensore di Riemann.
Rhkij = ∇iΓhjk − ∇jΓhik + ΓhimΓmjk − ΓhjmΓmik
Questa notazione ci permette di comprendere come un tensore di curvatura nullo sia ottenibile ponendo nulli i simboli di
Christoffel, condizione che si verifica in uno spazio euclideo (piatto).
La sola condizione di torsione nulla, non annulla il tensore di Riemann, ma solo la parentesi di Lie che lo compone.
Questa condizione permette di dimostrare in modo analogo all'identità di Jacobi la identità di Bianchi di primo ordine.
R(Z,X)Y + R(X,Y)Z + R(Y,Z)X = 0
Rhkij + Rhijk + Rhjki = 0
Deriviamo ogni singolo termine di questa identità rispettando la rotazione su tre indici.
∇pRhkij = (∇piΓhkj − ∇pjΓhki)
∇iRhkjp = (∇ijΓhkp − ∇ipΓhkj)
∇jRhkpi = (∇jpΓhki − ∇jiΓhkp)
Sommando le tre espressioni troviamo che ogni termine ha il suo opposto cosa che permette di scrivere la identità di Bianchi di secondo ordine.
∇pRhkij + ∇iRhkjp + ∇jRhkpi = 0
La forma covariante del tensore di Riemann si ottiene con il consueto prodotto con un tensore metrico.
ghuRhkij = Rukij
Gli indici i,j sono correlati ai versori delle basi che definiscono i vettori dei campi X,Y. Invece gli indici h,k sono indici muti, generati come contatori delle sommatorie di Einstein. La diversa natura si traduce in un comportamento simmetrico tra le due tipologie di indici. La simmetria inversa tra i,j è invece dovuta alla costruzione dell'indice come una sottrazione del tipo X−Y
Rukij = Rijuk
Rukij = −Rukji
Rukij = −Rkuij
Nel tensore di Riemann la presenza di un indice controvariante permette la sua contrazione con un indice covariante. Vista la simmetria tra i primi due indici e i secondi due, manteniamo un indice per coppia. La contrazione dell'indice controvariante avviene con il secondo o terzo indice covariante.
Rikij = Rkj = ∇iΓijk − ∇jΓiik + ΓiimΓmjk − ΓijmΓmik
Nel terzo addendo gli indici contrivarianti (alti) i e m sono indici muti, contatori di sommatoria che sono quindi rinominabili. Nel primo fattore l'indice i è contratto (in sincrono) con l'indice covariante. Visto che gli indici bassi cono invertibili possiamo rinominare l'indice controvariante da i a m portando la contrazione sull'antro indice basso. Nel secondo fattore l'indice m non coincide con nessun altro, possiamo rinominarlo come i anch'esso non coincidente con gli indici covarianti. Questa variazione di indici permette di scrivere il tensore di Ricci in modo equivalente coem:
Rikij = Rkj = ∇iΓijk − ∇jΓiik + ΓijkΓmim − ΓmikΓijm
Per semplificare la notazione possiamo utilizzare una base geodetica nella quale risultano nulli i simboli di Christoffel, ma non la loro derivata.
R*ikij = R*kj = ∇iΓijk − ∇jΓiik
La contrazione non avviene sul primo indice covariante in quanto questo porterebbe a un tensore sempre nullo.
Rhhij = ∇iΓhjh − ∇jΓhih + ΓhihΓhjh − ΓhjhΓhih
Rij = ∇iΓhjh − ∇jΓhih
Data l'antisimmetria degli indici i,j deve valere:
Rkj = −Rjk = ∇kΓhjh − ∇jΓhkh = − ∇jΓhkh − ∇kΓhjh
Cosa che porta ad avere un tensore nullo.
Possiamo contrarre ulteriormente il tensore.
gkjRkj = R
Utilizzando una base geodetica abbiamo la funzione descrittiva dello scalare di curvatura come funzione del tensore metrico e della derivata prima dei simboli di Christoffel.
R = gkj∇iΓhjh − gkj∇jΓhkh
Il tensore di Reimann è l'indicatore completo della geometria dello spazio. Le componenti sono venti, contro le dieci del
tensore di Ricci. Contraendo ulteriormente si ottiene un unico valore, lo scalare di curvatura. Comprendiamo come uno scalare
non possa contenere tutta l'informazione del tensore di Riemann, ma che ne sia solo una media.
Ogno volta che si esegue una contrazione si equagliano due indici. Ponendo i=j nella matrice ixj
vado a considerare (in un tensore a sommare) solo gli elementi della diagonale. Di una matrice ne estraggo la traccia. Si
perde quindi l'informazione dei componenti non appartenenti alla diagonale.
Il tensore di Weyl Chkij si prende carico di raccogliere l'informazione persa nelle contrazioni.
Si definisce infatti l'identità:
Rhkij = Rkj + R + Chkij
Il tensore di Riemann può essere espresso in forma mista, con due indici controvarianti e due covarianti: Rhkij. Utilizziamo questa forma nell'identità di Bianchi di secondo ordine.
∇pRhkij + ∇iRhkjp + ∇jRhkpi = 0
Applichiamo una contrazione per portare l'espressione in termini di tensori di Ricci. Operiamo la contrazione i=h
∇pRhkhj + ∇hRhkjp + ∇jRhkpi = 0
Nel primo termine abbiamo una contrazione tra il primo e il terzo indice che ci porta ad avere il tensore di Ricci: Rkj
Nel secondo termine invertiamo l'ordine nelle coppie controvariante e covariante degli indici del tensore. Per la doppia antisimmetria
si mantiene il segno: Rkhpj
Nel terzo termine possiamo invertire l'ordine dei soli indici covarianti ottenendo: −Rhkip che
per contrazione restituisce il tensore di Ricci: −Rkp.
Riscriviamo l'identità utilizzando i nuovi termini.
∇pRkj + ∇hRkhpj − ∇jRkp = 0
Proseguiamo la semplificazione con la contrazione k=p trovando nell'ultimo termine uno scalare di curvatura.
∇pRpj + ∇hRphpj − ∇jRpp = 0
∇pRpj + ∇hRhj − ∇jR = 0
Gli indici p e h sono muti, di sommatoria. Contando lo stesso numero di dimensioni possiamo considerare le sommatorie di Einstein dei primi due termini come una sola.
∇hRhj + ∇hRhj − ∇jR = 0
2∇hRhj − ∇jR = 0
∇hRhj − (1/2)∇jR = 0
Concentriamoci su ∇jR ricordando l'uguaglianza δhj=ghj.
∇jR = δhj∇hR = ∇h(δhjR) = ∇h(ghjR)
Applichiamo il risultato all'identità.
∇hRhj − (1/2)∇h(ghjR) = 0
∇h(Rhj − (1/2)(ghjR)) = 0
Abbiamo trovato una derivata covariante avente come argomento un tensore misto che definiamo tensore di Einstein. Possiamo scriverlo in forma mista, covariante e controvariante.
Ghj = Rhj − (1/2)(ghjR)
La derivata covariante rappresenta un operatore di sommatoria delle derivate direzionali applicate ai componenti dei vettori di un campo. Tale definizione corrisponde a quella della divergenza che se applicata a un campo misura appunto la divergenza (o convergenza se ha valore negativo) dei vettori tangenti le curve geodetiche. Da questa considerazione possiamo affermare dal tensore di Einstein che in uno spazio privo di torsione si ha uno stato conservativo.
∇hGhj = 0
Prendiamo come esempio di varietà la superficie di una sfera e analizziamola seguendo quanto fin qui visto.
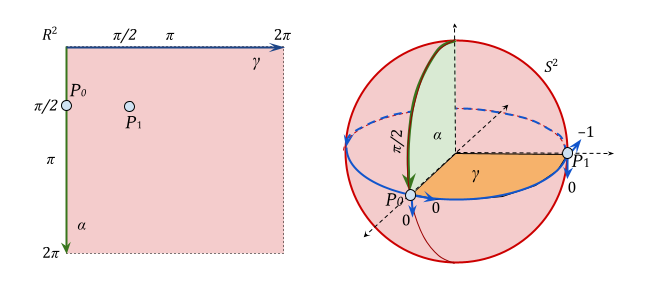 Parametrizzazione. Cerchiamo una corrispondenza biunivoca tra i punti della superficie della sfera con i punti di uno
spazio euclideo. Essendo la varietà una superficie bidimensionale utilizziamo per mapparla uno spazio R2 sul
quale definiamo un sistema di coordinate xi=(x1,x2). Creiamo una relazione
biunivoca con uno spazio contenitore euclideo tridimensionale (λ1,λ2,λ3).
Parametrizzazione. Cerchiamo una corrispondenza biunivoca tra i punti della superficie della sfera con i punti di uno
spazio euclideo. Essendo la varietà una superficie bidimensionale utilizziamo per mapparla uno spazio R2 sul
quale definiamo un sistema di coordinate xi=(x1,x2). Creiamo una relazione
biunivoca con uno spazio contenitore euclideo tridimensionale (λ1,λ2,λ3).
λ1 = Rsin(x1)cos(x2)
λ2 = Rsin(x1)sin(x2)
λ1 = Rcos(x1)
Jacobiana. Creiamo la matrice delle relazioni tra i differenziali delle coordinate.
∂λ1/∂x1 ∂λ1/∂x2
∂λ2/∂x1 ∂λ2/∂x2
∂λ3/∂x1 ∂λ3/∂x2
Calcoliamo ora i componenti ossia le derivate direzionali.
Rcos(x1)cos(x2) −Rsin(x1)sin(x2)
Rcos(x1)sin(x2) Rsin(x1)cos(x2)
−Rsin(x1) 0
Base piani tangente. Sapendo del ruolo di coefficiente di proporzione della Jacobiana, ossia che ui=Jxj, moltiplichiamola per il vettore x e sommiamo orizzontalmente gli elementi della matrice andando a ottenere i versori definiti nello spazio contenitore.
u1 = (∂λ1/∂x1)∂x1 + (∂λ1/∂x2)∂x2 = Rcos(x1)cos(x2)∂x1 − Rsin(x1)sin(x2)∂x2
u2 = (∂λ2/∂x1)∂x1 + (∂λ2/∂x2)∂x2 = Rcos(x1)sin(x2)∂x1 + Rsin(x1)cos(x2)∂x2
u3 = (∂λ3/∂x1)∂x1 + (∂λ3/∂x2)∂x2 = −Rsin(x1)∂x1
Vettore tangente. Considerando unitaria la derivata temporale delle coordinate x, definiamo i vettori tangenti la varietà, misurati lungo le direttrici definite dagli assi dello spazio contenitore.
dui/dt = (∂λi/∂xj)(dxj/dt)
Calcolando le derivate direzionali in un punto P(x1,x2)=P(π/2,0) i vettori direzionali lungo le direttrici λ1,λ2,λ3 risultano assumere i seguenti valori:
Rcos(π/2)cos(0) −Rsin(π/2)sin(0)
Rcos(π/2)sin(0) Rsin(π/2)cos(0)
−Rsin(π/2) 0
0 0
0 R
−R 0
u1 = (0,0)
u2 = (0,R)
u3 = (−R,0)
Nel punto P abbiamo un piano tangente nel quale poggiano i vettori u2 e u3
che possiamo assumere al ruolo di base locale per un intorno di P.
Base associata. Riprendendo la Jacobiana sommiamo verticalmente gli elementi.
e1 = ∂λ1/∂x1 + ∂λ2/∂x1 + ∂λ3/∂x1
e2 = ∂λ1/∂x2 + ∂λ2/∂x2 + ∂λ3/∂x2
e1 = Rcos(x1)cos(x2) + Rcos(x1)sin(x2) − Rsin(x1)
e2 = −Rsin(x1)sin(x2) + Rsin(x1)cos(x2)
Nel punto P(π/2,0) abbiamo i seguenti vettori:
e1 = Rcos(π/2)cos(0) + Rcos(π/2)sin(0) − Rsin(π/2)
e2 = −Rsin(π/2)sin(0) + Rsin(π/2)cos(0)
e1 = (0, 0, −R)
e2 = (0, R, 0)
Abbiamo trovato due versori coerenti con i versori x da adottare per una base del piano tangente la varietà nel punto P.
Tensore metrico. Il tensore metrico è composto da elementi formati dal prodotto scalare di tutte le combinazioni di coppie
dei versori e. Calcoliamoli sapendo che <u1+u2,v1+v2>=u1v1+u2v2.
g11 = <e1,e1>
= Rcos(x1)cos(x2)Rcos(x1)cos(x2) + Rcos(x1)sin(x2)Rcos(x1)sin(x2) + Rsin(x1)Rsin(x1)
= R2[cos2(x1)cos2(x2) + cos2(x1)sin2(x2) + sin2(x1)]
= R2[cos2(x1)[cos2(x2) + sin2(x2)] + sin2(x1)]
= R2
g12 = <e1,e2>
= −Rcos(x1)cos(x2)Rsin(x1)sin(x2) + Rcos(x1)sin(x2)Rsin(x1)cos(x2) − Rsin(x1)0
= R2[−cos(x1)cos(x2)sin(x1)sin(x2) + cos(x1)sin(x2)sin(x1)cos(x2)]
= R2[0] = 0
g12 = g21 = 0
g22 = <e2,e1>
= Rsin(x1)sin(x2)Rsin(x1)sin(x2) + Rsin(x1)cos(x2)Rsin(x1)cos(x2)
= R2[sin2(x1)sin2(x2) + sin2(x1)cos2(x2)]
= R2sin2(x1)[sin2(x2) + cos2(x2)]
= R2sin2(x1)
Scriviamo quindi la matrice quadrata del tensore metrico gij di una varietà sferica.
R2 0
0 R2sin2(x1)
Simboli di Christoffel. Sono una combinazione lineare delle derivate direzionali calcolate sui componenti del tensore metrico. Ricordiamo la formula dei simboli di prima specie nel caso di una connessione di Levi-Civita: [ij,k]=(1/2)[∂i(gkj)+∂j(gik)−∂k(gij)]. La combinazione di tre indici a due valori porta a 23=8 numeri che calcoliamo.
[11,1] = (1/2)(∂g11/∂x1 + ∂g11/∂x1 − ∂g11/∂x1)
= (1/2)(∂R2/∂x1 + ∂R2/∂x1 − ∂R2/∂x1) = 0
[11,2] = (1/2)(∂g21/∂x1 + ∂g12/∂x1 − ∂g11/∂x2)
= (1/2)(0/∂x1 + 0/∂x1 − ∂R2/∂x2) = 0
[12,1] = (1/2)(∂g12/∂x1 + ∂g11/∂x2 − ∂g12/∂x2)
= (1/2)(0/∂x1 + ∂R2/∂x2 − 0/∂x2) = 0
[12,2] = (1/2)(∂g22/∂x1 + ∂g12/∂x2 − ∂g12/∂x2)
= (1/2)(∂R2sin2(x1)/∂x1 + 0/∂x2 − 0/∂x2 = R2sin(x1)cos(x1)
[21,1] = (1/2)(∂g11/∂x2 + ∂g12/∂x1 − ∂g21/∂x1)
= (1/2)(∂R2/∂x2 + 0/∂x1 − 0/∂x1) = 0
[21,2] = (1/2)(∂g21/∂x2 + ∂g22/∂x1 − ∂g21/∂x2)
= (1/2)(0/∂x2 + ∂R2sin2(x1)/∂x1 − 0/∂x2 = R2sin(x1)cos(x1)
[22,1] = (1/2)(∂g12/∂x2 + ∂g12/∂x2 − ∂g22/∂x1)
= (1/2)(0/∂x2 + 0/∂x2 − ∂R2sin2(x1)/∂x1) = −R2sin(x1)cos(x1)
[22,2] = (1/2)(∂g22/∂x2 + ∂g22/∂x2 − ∂g22/∂x2)
= (1/2)(∂R2sin2(x1)/∂x2 + ∂R2sin2(x1)/∂x2 − ∂R2sin2(x1)/∂x2) = 0
Il fatto che i componenti del tensore metrico non variano lungo tutte le direzioni e la presenza di diversi a valore nullo comporta l'annullamento di molti simboli. I simboli di seconda specie sono dati da Γlij=gkl[ij,k]. Calcolimoli per le sole combinazioni aventi almeno un componente non nullo. Ricordiamo che il tensore metrico controvariante ha coefficienti inversi rispetto a quelli del tensore covariante.
Γ112 = gk1[12,k] = g11[12,1] + g21[12,2] = 0
Γ212 = gk2[12,k] = g12[12,2] + g22[12,2] =
(1/R2sin2(x1))(R2sin(x1)cos(x1)) = cot(x1)
Γ121 = gk1[21,k] = g11[21,1] + g21[21,2] = 0
Γ221 = gk2[21,k] = g12[21,1] + g22[21,2] =
(1/R2sin2(x1))(R2sin(x1)cos(x1)) = cot(x1)
Γ122 = gk1[22,k] = g11[22,1] + g21[22,2] =
(1/R2)(−R2sin(x1)cos(x1)) = −sin(x1)cos(x1)
Γ222 = gk2[22,k] = g12[22,1] + g22[22,2] = 0
Osserviamo che si dimostra verificata le simmetrie Γ112=Γ121 e Γ212=Γ221
Tensore di Riemann. Partiamo dalla generica formula e ricerchiamo le soluzioni: Rhkij=∇iΓhjk−∇jΓhik+ΓhirΓrjk−ΓhjrΓrik.
R1122 = ∇2Γ121 − ∇2Γ121 + Γ12rΓr21 − Γ12rΓr21 = 0
Per simmetria abbiamo nullo il componente R2211
R1222 = ∇2Γ122 − ∇2Γ122 + Γ12rΓr22 − Γ12rΓr22 = 0
Sono nulli anche i componenti R2111, R1121, R2212
Troviamo invece valori non nulli per i componenti seguenti:
R1212 = ∇1Γ122 − ∇2Γ121 + Γ11rΓr22 − Γ12rΓr12
= ∇1Γ122 − ∇2Γ121 + (Γ111Γ122 + Γ112Γ222) − (Γ121Γ112 + Γ122Γ212)
= ∇1(−sin(x1)cos(x1)) − 0 + (0 + 0) − (0 + (−sin(x1)cos(x1))cot(x1)
= −(cos(x1)cos(x1)) + (−sin2(x1)(−sin2(x1) − (−sin(x1)cos(x1))(cos(x1)/sin(x1))
= −cos2(x1) + sin2(x1) + cos2(x1) = sin2(x1)
Per le regole di simmetria abbiamo:
R1212 = R2121 = sin2(x1)
R1221 = R2112 = −sin2(x1)
Del tensore di Riemann possiamo avere anche una rappresentazione totalmente covariante attraverso la moltiplicazione con il tensore metrico: ghqRhkij=Rqkij. Eseguiamo la moltiplicazione del componente non nullo del tensore di Riemann per i soli componenti del tensore metrico aventi un indice uguale all'indice che vogliamo abbassare.
g11R1212 = R1212 = R2sin2(x1)
g12R1212 = R2212 = 0
Tensore di Ricci. Dal tensore di Riemann covariante otteniamo facilmente il tensore di Ricci sempre attraverso una moltiplicazione con il tensore metrico: gqiRqkij. Abbiamo due possibili componenti, essendo due i gij non nulli. Il risultato è una matrice diagonale i cui valori sulla diagonale sono:
g11R1212 = R22 = (1/R2)R2sin2(x1) = sin2(x1)
g22R1212 = R11 = (1/R2sin2(x1))R2sin2(x1) = 1
Scalare di curvatura. Proseguiamo con la contrazione: gijRij=R.
g11R11 = R = (1/R2)
g22R22 = R = (1/R2sin2(x1))sin2(x1) = R = (1/R2)
I due valori sono in capo allo stesso tensore che risulta quindi come loro somma.
R = 1/R2 + 1/R2 = 2/R2
Il tensore di Einstein. Riprendiamo la sua espressione in forma covariante: Ghj=Rhj−(1/2)(ghjR).
G22 = R22−(1/2)g22R = sin2(x1)−(1/2)(R2sin2(x1))(2/R2) = 0
G11 = R11−(1/2)g11R = 1−(1/2)(R2)(2/R2) = 0